楼主 #1 2018-06-04 20:53:18 分享评论
- 晕哥
- 管理员

- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
ns2009触摸芯片太蛋疼了,出来的原始数据偶尔经常出现大偏差
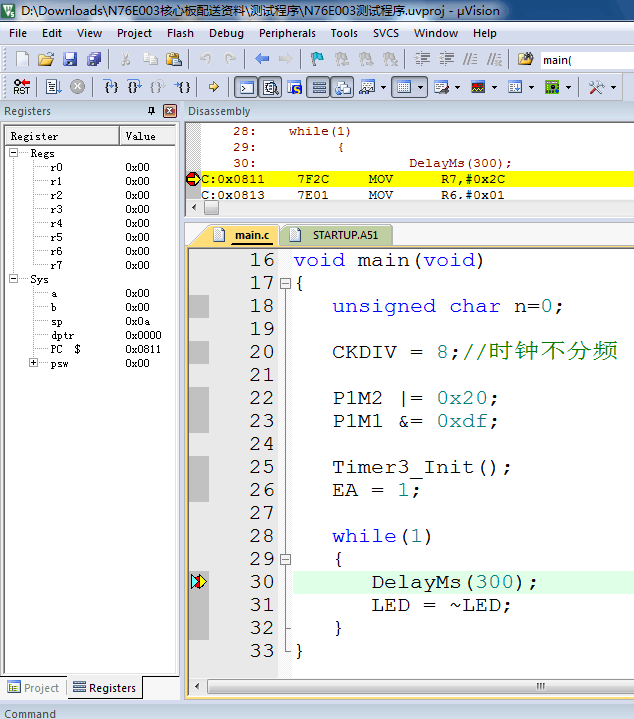
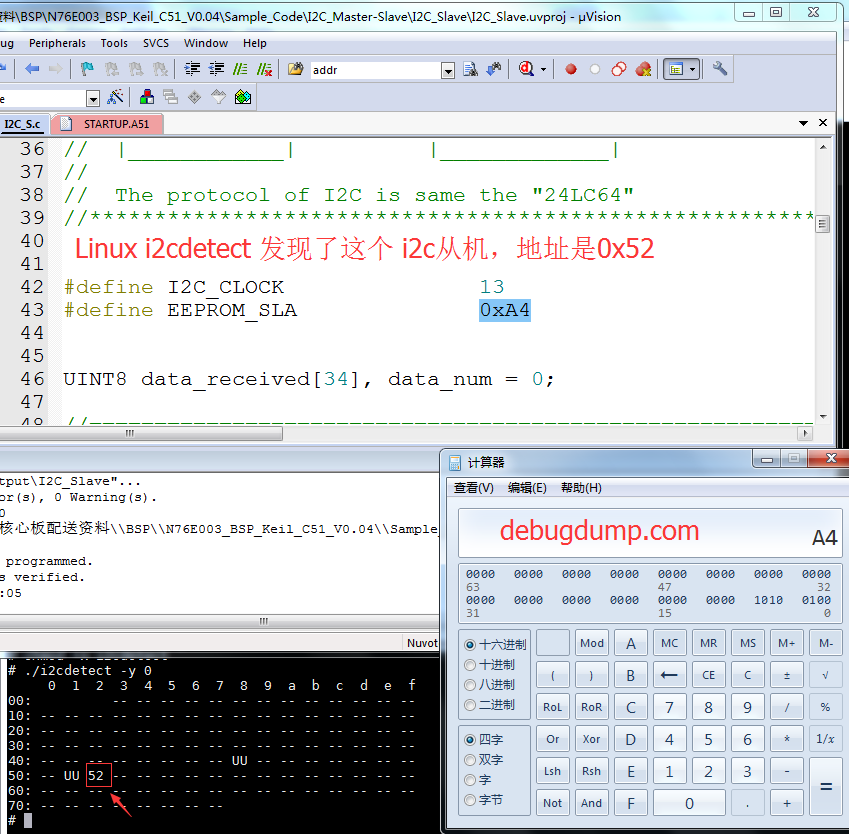
戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机N76E003模拟.
英文手册: DS_N76E003_EN_Rev0_04.pdf
中文手册: DS_N76E003_SC_Rev0_04.pdf
keil c51: c51v957.exe
破解补丁: KEIL_Lic.rar
开发板资料下载 QQ群附件: 623495321
开发板资料下载 链接: http://pan.baidu.com/s/1cCeT7g 密码:1n7f
开发板原理图: n76e003_sch.pdf
NU Link仿真器:
https://item.taobao.com/item.htm?id=562773467355
N76E003AT20开发板:
https://item.taobao.com/item.htm?id=562773539677
-----------------------------------------------------
一开始我用荔枝派zero提供的 ns2009芯片和轮询驱动,出现触摸乱跳问题。
然后用TSC2007 + 中断驱动, 然而还是没x用。
我板子上叠了两个芯片的位置。
离线
楼主 #2 2018-06-04 21:07:16 分享评论

楼主 #3 2018-06-04 21:07:52 分享评论
楼主 #4 2018-06-05 08:36:01 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
找到兼容芯片了, 封装一模一样,手册也基本是照抄的:
AK4183KT手册: AK4183KT.pdf
NS2009中文手册: ns2009_ds_chinese.pdf
ZT2083手册: ZT2083.pdf
离线
楼主 #5 2018-06-05 17:06:53 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
&i2c0 {
status = "okay";tsc2007: tsc2007@48 {
compatible = "ti,tsc2007";
reg = <0x48>;
gpios = <&pio 6 0 GPIO_ACTIVE_LOW>;
ti,x-plate-ohms = <500>;
status = "okay";
};rtc@51 {
compatible = "nxp,pcf8563";
reg = <0x51>;
};
};
tsc2007_core.c:
/*
* drivers/input/touchscreen/tsc2007.c
*
* Copyright (c) 2008 MtekVision Co., Ltd.
* Kwangwoo Lee <kwlee@mtekvision.com>
*
* Using code from:
* - ads7846.c
* Copyright (c) 2005 David Brownell
* Copyright (c) 2006 Nokia Corporation
* - corgi_ts.c
* Copyright (C) 2004-2005 Richard Purdie
* - omap_ts.[hc], ads7846.h, ts_osk.c
* Copyright (C) 2002 MontaVista Software
* Copyright (C) 2004 Texas Instruments
* Copyright (C) 2005 Dirk Behme
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/i2c.h>
#include "tsc2007.h"
#include <linux/of_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/platform_data/tsc2007.h>
#define TSC2007_MEASURE_TEMP0 (0x0 << 4)
#define TSC2007_MEASURE_AUX (0x2 << 4)
#define TSC2007_MEASURE_TEMP1 (0x4 << 4)
#define TSC2007_ACTIVATE_XN (0x8 << 4)
#define TSC2007_ACTIVATE_YN (0x9 << 4)
#define TSC2007_ACTIVATE_YP_XN (0xa << 4)
#define TSC2007_SETUP (0xb << 4)
#define TSC2007_MEASURE_X (0xc << 4)
#define TSC2007_MEASURE_Y (0xd << 4)
#define TSC2007_MEASURE_Z1 (0xe << 4)
#define TSC2007_MEASURE_Z2 (0xf << 4)
#define TSC2007_POWER_OFF_IRQ_EN (0x0 << 2)
#define TSC2007_ADC_ON_IRQ_DIS0 (0x1 << 2)
#define TSC2007_ADC_OFF_IRQ_EN (0x2 << 2)
#define TSC2007_ADC_ON_IRQ_DIS1 (0x3 << 2)
#define TSC2007_12BIT (0x0 << 1)
#define TSC2007_8BIT (0x1 << 1)
#define MAX_12BIT ((1 << 12) - 1)
#define ADC_ON_12BIT (TSC2007_12BIT | TSC2007_ADC_ON_IRQ_DIS0)
#define READ_Y (ADC_ON_12BIT | TSC2007_MEASURE_Y)
#define READ_Z1 (ADC_ON_12BIT | TSC2007_MEASURE_Z1)
#define READ_Z2 (ADC_ON_12BIT | TSC2007_MEASURE_Z2)
#define READ_X (ADC_ON_12BIT | TSC2007_MEASURE_X)
#define PWRDOWN (TSC2007_12BIT | TSC2007_POWER_OFF_IRQ_EN)
/*
* This define forces debug prints during development
*/
#define DEBUG_PRINT (1)
#if(DEBUG_PRINT == 1)
#define SR_DEBUG dev_err
#else
#define SR_DEBUG dev_dbg
#endif
static inline int tsc2007_xfer(struct tsc2007 *tsc, u8 cmd)
{
s32 data;
u16 val;
data = i2c_smbus_read_word_data(tsc->client, cmd);
if (data < 0) {
dev_err(&tsc->client->dev, "i2c io error: %d\n", data);
return data;
}
/* The protocol and raw data format from i2c interface:
* S Addr Wr [A] Comm [A] S Addr Rd [A] [DataLow] A [DataHigh] NA P
* Where DataLow has [D11-D4], DataHigh has [D3-D0 << 4 | Dummy 4bit].
*/
val = swab16(data) >> 4;
dev_dbg(&tsc->client->dev, "data: 0x%x, val: 0x%x\n", data, val);
return val;
}
static void tsc2007_read_values(struct tsc2007 *tsc, struct ts_event *tc)
{
/* y- still on; turn on only y+ (and ADC) */
tc->y = tsc2007_xfer(tsc, READ_Y);
/* turn y- off, x+ on, then leave in lowpower */
tc->x = tsc2007_xfer(tsc, READ_X);
/* turn y+ off, x- on; we'll use formula #1 */
tc->z1 = tsc2007_xfer(tsc, READ_Z1);
tc->z2 = tsc2007_xfer(tsc, READ_Z2);
/* Prepare for next touch reading - power down ADC, enable PENIRQ */
tsc2007_xfer(tsc, PWRDOWN);
}
static u32 tsc2007_calculate_pressure(struct tsc2007 *tsc, struct ts_event *tc)
{
u32 rt = 0;
/* range filtering */
if (tc->x == MAX_12BIT)
tc->x = 0;
if (likely(tc->x && tc->z1)) {
/* compute touch pressure resistance using equation #1 */
rt = tc->z2 - tc->z1;
rt *= tc->x;
rt *= tsc->x_plate_ohms;
rt /= tc->z1;
rt = (rt + 2047) >> 12;
}
return rt;
}
static bool tsc2007_is_pen_down(struct tsc2007 *ts)
{
/*
* NOTE: We can't rely on the pressure to determine the pen down
* state, even though this controller has a pressure sensor.
* The pressure value can fluctuate for quite a while after
* lifting the pen and in some cases may not even settle at the
* expected value.
*
* The only safe way to check for the pen up condition is in the
* work function by reading the pen signal state (it's a GPIO
* and IRQ). Unfortunately such callback is not always available,
* in that case we assume that the pen is down and expect caller
* to fall back on the pressure reading.
*/
if (!ts->get_pendown_state)
return true;
return ts->get_pendown_state(&ts->client->dev);
}
static irqreturn_t tsc2007_soft_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
struct input_dev *input = ts->input;
struct ts_event tc;
u32 rt;
SR_DEBUG(&ts->client->dev, "%s: Entering\n", __func__);
while (!ts->stopped && tsc2007_is_pen_down(ts)) {
/* pen is down, continue with the measurement */
tsc2007_read_values(ts, &tc);
rt = tsc2007_calculate_pressure(ts, &tc);
if (!rt && !ts->get_pendown_state) {
/*
* If pressure reported is 0 and we don't have
* callback to check pendown state, we have to
* assume that pen was lifted up.
*/
break;
}
if (rt <= ts->max_rt) {
dev_dbg(&ts->client->dev,
"DOWN point(%4d,%4d), pressure (%4u)\n",
tc.x, tc.y, rt);
input_report_key(input, BTN_TOUCH, 1);
input_report_abs(input, ABS_X, tc.x);
input_report_abs(input, ABS_Y, tc.y);
input_report_abs(input, ABS_PRESSURE, rt);
input_sync(input);
} else {
/*
* Sample found inconsistent by debouncing or pressure is
* beyond the maximum. Don't report it to user space,
* repeat at least once more the measurement.
*/
dev_dbg(&ts->client->dev, "ignored pressure %d\n", rt);
}
wait_event_timeout(ts->wait, ts->stopped,
msecs_to_jiffies(10)); /* ts->poll_period */
}
//dev_dbg(&ts->client->dev, "UP\n");
SR_DEBUG(&ts->client->dev, "UP\n");
input_report_key(input, BTN_TOUCH, 0);
input_report_abs(input, ABS_PRESSURE, 0);
input_sync(input);
if (ts->clear_penirq)
ts->clear_penirq();
/* Now that the touch has been handled, re-enabled the PENIRQ */
enable_irq(ts->irq);
return IRQ_HANDLED;
}
static irqreturn_t tsc2007_hard_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
SR_DEBUG(&ts->client->dev, "%s: Entering\n", __func__);
if (tsc2007_is_pen_down(ts))
{
/* Once the IRQ handling starts, disable the interrupt */
disable_irq_nosync(ts->irq);
SR_DEBUG(&ts->client->dev, "%s: Pen down returns true\n", __func__);
return IRQ_WAKE_THREAD;
}
if (ts->clear_penirq)
{
SR_DEBUG(&ts->client->dev, "%s: Clear pending interrupt", __func__);
ts->clear_penirq();
}
return IRQ_HANDLED;
}
static void tsc2007_stop(struct tsc2007 *ts)
{
ts->stopped = true;
mb();
wake_up(&ts->wait);
disable_irq(ts->irq);
}
static int tsc2007_open(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
int err;
ts->stopped = false;
mb();
enable_irq(ts->irq);
SR_DEBUG(&ts->client->dev, "%s: Executed\n", __func__);
/* Prepare for touch readings - power down ADC and enable PENIRQ */
err = tsc2007_xfer(ts, PWRDOWN);
if (err < 0) {
tsc2007_stop(ts);
return err;
}
return 0;
}
static void tsc2007_close(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
tsc2007_stop(ts);
}
#ifdef CONFIG_OF
static int tsc2007_get_pendown_state_gpio(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct tsc2007 *ts = i2c_get_clientdata(client);
return !gpio_get_value(ts->gpio);
}
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
struct device_node *np = client->dev.of_node;
u32 val32;
u64 val64;
if (!np) {
dev_err(&client->dev, "missing device tree data\n");
return -EINVAL;
}
if (!of_property_read_u32(np, "ti,max-rt", &val32))
ts->max_rt = val32;
else
ts->max_rt = MAX_12BIT;
if (!of_property_read_u32(np, "ti,fuzzx", &val32))
ts->fuzzx = val32;
if (!of_property_read_u32(np, "ti,fuzzy", &val32))
ts->fuzzy = val32;
if (!of_property_read_u32(np, "ti,fuzzz", &val32))
ts->fuzzz = val32;
if (!of_property_read_u64(np, "ti,poll-period", &val64))
ts->poll_period = val64;
else
ts->poll_period = 1;
if (!of_property_read_u32(np, "ti,x-plate-ohms", &val32)) {
ts->x_plate_ohms = val32;
} else {
dev_err(&client->dev, "missing ti,x-plate-ohms devicetree property.");
return -EINVAL;
}
ts->gpio = of_get_gpio(np, 0);
printk("ts->gpio = %d\n", ts->gpio);
if (gpio_is_valid(ts->gpio))
{
ts->get_pendown_state = tsc2007_get_pendown_state_gpio;
/* If GPIO is valid, then request the GPIO for use */
SR_DEBUG(&client->dev, "%s: Requesting GPIO", __func__);
if (gpio_request(ts->gpio, "nPENIRQ"))
{
//SR_DEBUG(&client->dev, "%s: Requesting GPIO failed", __func__);
return 0;
}
/* Set the direction to be input - may not be required */
SR_DEBUG(&client->dev, "%s: Setting direction for GPIO", __func__);
if (gpio_direction_input(ts->gpio))
{
gpio_free(ts->gpio);
return 0;
}
/* Set the debounce limit/value for the GPIO
//SR_DEBUG(&client->dev, "%s: Setting debounce for GPIO", __func__);
if (gpio_set_debounce(ts->gpio, 50000))
{
gpio_free(ts->gpio);
return 0;
}*/
}
else
dev_warn(&client->dev,
"GPIO not specified in DT (of_get_gpio returned %d)\n",
ts->gpio);
return 0;
}
#else
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
dev_err(&client->dev, "platform data is required!\n");
return -EINVAL;
}
#endif
static int tsc2007_probe_pdev(struct i2c_client *client, struct tsc2007 *ts,
const struct tsc2007_platform_data *pdata,
const struct i2c_device_id *id)
{
ts->model = pdata->model;
ts->x_plate_ohms = pdata->x_plate_ohms;
ts->max_rt = pdata->max_rt ? : MAX_12BIT;
ts->poll_period = pdata->poll_period ? : 1;
ts->get_pendown_state = pdata->get_pendown_state;
ts->clear_penirq = pdata->clear_penirq;
ts->fuzzx = pdata->fuzzx;
ts->fuzzy = pdata->fuzzy;
ts->fuzzz = pdata->fuzzz;
if (pdata->x_plate_ohms == 0) {
dev_err(&client->dev, "x_plate_ohms is not set up in platform data");
return -EINVAL;
}
return 0;
}
static void tsc2007_call_exit_platform_hw(void *data)
{
struct device *dev = data;
const struct tsc2007_platform_data *pdata = dev_get_platdata(dev);
pdata->exit_platform_hw();
}
static int tsc2007_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct tsc2007_platform_data *pdata = dev_get_platdata(&client->dev);
struct tsc2007 *ts;
struct input_dev *input_dev;
int err;
if (!i2c_check_functionality(client->adapter,
I2C_FUNC_SMBUS_READ_WORD_DATA))
return -EIO;
ts = devm_kzalloc(&client->dev, sizeof(struct tsc2007), GFP_KERNEL);
if (!ts)
return -ENOMEM;
if (pdata)
err = tsc2007_probe_pdev(client, ts, pdata, id);
else
err = tsc2007_probe_dt(client, ts);
if (err)
return err;
input_dev = devm_input_allocate_device(&client->dev);
if (!input_dev)
return -ENOMEM;
i2c_set_clientdata(client, ts);
ts->client = client;
/* map GPIO numbers to IRQ numbers */
client->irq = gpio_to_irq(ts->gpio);
ts->irq = client->irq;
SR_DEBUG(&client->dev, "%s: IRQ number is %d", __func__, ts->irq);
ts->input = input_dev;
init_waitqueue_head(&ts->wait);
snprintf(ts->phys, sizeof(ts->phys),
"%s/input0", dev_name(&client->dev));
input_dev->name = "TSC2007 Touchscreen";
input_dev->phys = ts->phys;
input_dev->id.bustype = BUS_I2C;
input_dev->open = tsc2007_open;
input_dev->close = tsc2007_close;
input_set_drvdata(input_dev, ts);
input_dev->evbit[0] = BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
input_dev->keybit[BIT_WORD(BTN_TOUCH)] = BIT_MASK(BTN_TOUCH);
input_set_abs_params(input_dev, ABS_X, 0, MAX_12BIT, ts->fuzzx, 0);
input_set_abs_params(input_dev, ABS_Y, 0, MAX_12BIT, ts->fuzzy, 0);
input_set_abs_params(input_dev, ABS_PRESSURE, 0, MAX_12BIT,
ts->fuzzz, 0);
if (pdata) {
if (pdata->exit_platform_hw) {
err = devm_add_action(&client->dev,
tsc2007_call_exit_platform_hw,
&client->dev);
if (err) {
dev_err(&client->dev,
"Failed to register exit_platform_hw action, %d\n",
err);
return err;
}
}
if (pdata->init_platform_hw)
pdata->init_platform_hw();
}
err = devm_request_threaded_irq(&client->dev, ts->irq,
tsc2007_hard_irq, tsc2007_soft_irq,
IRQF_TRIGGER_FALLING /*| IRQF_TRIGGER_RISING | IRQF_ONESHOT*/,
client->dev.driver->name, ts);
if (err) {
dev_err(&client->dev, "Failed to request irq %d: %d\n",
ts->irq, err);
return err;
}
tsc2007_stop(ts);
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"Failed to register input device: %d\n", err);
return err;
}
return 0;
}
static const struct i2c_device_id tsc2007_idtable[] = {
{ "tsc2007", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, tsc2007_idtable);
#ifdef CONFIG_OF
static const struct of_device_id tsc2007_of_match[] = {
{ .compatible = "ti,tsc2007" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, tsc2007_of_match);
#endif
static struct i2c_driver tsc2007_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "tsc2007",
.of_match_table = of_match_ptr(tsc2007_of_match),
},
.id_table = tsc2007_idtable,
.probe = tsc2007_probe,
};
module_i2c_driver(tsc2007_driver);
MODULE_AUTHOR("Kwangwoo Lee <kwlee@mtekvision.com>");
MODULE_DESCRIPTION("TSC2007 TouchScreen Driver");
MODULE_LICENSE("GPL");中断查看:
cat /proc/interrupts
CPU0
19: 28915 GIC-0 27 Level arch_timer
21: 0 GIC-0 50 Level /soc/timer@01c20c00
22: 0 GIC-0 82 Level 1c02000.dma-controller
23: 29990 GIC-0 92 Level sunxi-mmc
24: 2 GIC-0 103 Level musb-hdrc.1.auto
25: 0 GIC-0 104 Level ehci_hcd:usb1
26: 0 GIC-0 105 Level ohci_hcd:usb2
31: 0 GIC-0 62 Level sun4i-a10-lradc-keys
34: 4 GIC-0 33 Level
36: 304044 GIC-0 38 Level mv64xxx_i2c
37: 3692 GIC-0 114 Level eth0
38: 213809 GIC-0 97 Level sun6i-spi
71: 1401 sunxi_pio_edge 32 Edge tsc2007
IPI0: 0 CPU wakeup interrupts
IPI1: 0 Timer broadcast interrupts
IPI2: 0 Rescheduling interrupts
IPI3: 0 Function call interrupts
IPI4: 0 CPU stop interrupts
IPI5: 0 IRQ work interrupts
IPI6: 0 completion interrupts
Err: 0
从一个 NUC972 开发板拆了一片 TSC2007 下来,
并且使用了 GPIO 中断, 发现没有什么改善.
离线
楼主 #6 2018-06-05 18:13:45 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
调整了一下 tsc2007_core.c:
/*
* drivers/input/touchscreen/tsc2007.c
*
* Copyright (c) 2008 MtekVision Co., Ltd.
* Kwangwoo Lee <kwlee@mtekvision.com>
*
* Using code from:
* - ads7846.c
* Copyright (c) 2005 David Brownell
* Copyright (c) 2006 Nokia Corporation
* - corgi_ts.c
* Copyright (C) 2004-2005 Richard Purdie
* - omap_ts.[hc], ads7846.h, ts_osk.c
* Copyright (C) 2002 MontaVista Software
* Copyright (C) 2004 Texas Instruments
* Copyright (C) 2005 Dirk Behme
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/i2c.h>
#include <linux/of_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/platform_data/tsc2007.h>
#include "tsc2007.h"
int tsc2007_xfer(struct tsc2007 *tsc, u8 cmd)
{
s32 data;
u16 val;
data = i2c_smbus_read_word_data(tsc->client, cmd);
if (data < 0) {
dev_err(&tsc->client->dev, "i2c io error: %d\n", data);
return data;
}
/* The protocol and raw data format from i2c interface:
* S Addr Wr [A] Comm [A] S Addr Rd [A] [DataLow] A [DataHigh] NA P
* Where DataLow has [D11-D4], DataHigh has [D3-D0 << 4 | Dummy 4bit].
*/
val = swab16(data) >> 4;
dev_dbg(&tsc->client->dev, "data: 0x%x, val: 0x%x\n", data, val);
return val;
}
static void tsc2007_read_values(struct tsc2007 *tsc, struct ts_event *tc)
{
/* y- still on; turn on only y+ (and ADC) */
tc->y = tsc2007_xfer(tsc, READ_Y);
/* turn y- off, x+ on, then leave in lowpower */
tc->x = tsc2007_xfer(tsc, READ_X);
/* turn y+ off, x- on; we'll use formula #1 */
tc->z1 = tsc2007_xfer(tsc, READ_Z1);
tc->z2 = tsc2007_xfer(tsc, READ_Z2);
/* Prepare for next touch reading - power down ADC, enable PENIRQ */
tsc2007_xfer(tsc, PWRDOWN);
}
u32 tsc2007_calculate_pressure(struct tsc2007 *tsc, struct ts_event *tc)
{
u32 rt = 0;
/* range filtering */
if (tc->x == MAX_12BIT)
tc->x = 0;
if (likely(tc->x && tc->z1)) {
/* compute touch pressure resistance using equation #1 */
rt = tc->z2 - tc->z1;
rt *= tc->x;
rt *= tsc->x_plate_ohms;
rt /= tc->z1;
rt = (rt + 2047) >> 12;
}
return rt;
}
bool tsc2007_is_pen_down(struct tsc2007 *ts)
{
/*
* NOTE: We can't rely on the pressure to determine the pen down
* state, even though this controller has a pressure sensor.
* The pressure value can fluctuate for quite a while after
* lifting the pen and in some cases may not even settle at the
* expected value.
*
* The only safe way to check for the pen up condition is in the
* work function by reading the pen signal state (it's a GPIO
* and IRQ). Unfortunately such callback is not always available,
* in that case we assume that the pen is down and expect caller
* to fall back on the pressure reading.
*/
if (!ts->get_pendown_state)
return true;
return ts->get_pendown_state(&ts->client->dev);
}
static irqreturn_t tsc2007_soft_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
struct input_dev *input = ts->input;
struct ts_event tc;
u32 rt;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
while (!ts->stopped && tsc2007_is_pen_down(ts)) {
/* pen is down, continue with the measurement */
tsc2007_read_values(ts, &tc);
rt = tsc2007_calculate_pressure(ts, &tc);
if (!rt && !ts->get_pendown_state) {
/*
* If pressure reported is 0 and we don't have
* callback to check pendown state, we have to
* assume that pen was lifted up.
*/
break;
}
if (rt <= ts->max_rt) {
dev_dbg(&ts->client->dev,
"DOWN point(%4d,%4d), pressure (%4u)\n",
tc.x, tc.y, rt);
input_report_key(input, BTN_TOUCH, 1);
input_report_abs(input, ABS_X, tc.x);
input_report_abs(input, ABS_Y, tc.y);
input_report_abs(input, ABS_PRESSURE, rt);
input_sync(input);
} else {
/*
* Sample found inconsistent by debouncing or pressure is
* beyond the maximum. Don't report it to user space,
* repeat at least once more the measurement.
*/
dev_dbg(&ts->client->dev, "ignored pressure %d\n", rt);
}
wait_event_timeout(ts->wait, ts->stopped,
msecs_to_jiffies(10)); /* ts->poll_period */
}
//dev_dbg(&ts->client->dev, "UP\n");
dev_dbg(&ts->client->dev, "UP\n");
input_report_key(input, BTN_TOUCH, 0);
input_report_abs(input, ABS_PRESSURE, 0);
input_sync(input);
if (ts->clear_penirq)
ts->clear_penirq();
/* Now that the touch has been handled, re-enabled the PENIRQ */
enable_irq(ts->irq);
return IRQ_HANDLED;
}
static irqreturn_t tsc2007_hard_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
if (tsc2007_is_pen_down(ts))
{
/* Once the IRQ handling starts, disable the interrupt */
disable_irq_nosync(ts->irq);
dev_dbg(&ts->client->dev, "%s: Pen down returns true\n", __func__);
return IRQ_WAKE_THREAD;
}
if (ts->clear_penirq)
{
dev_dbg(&ts->client->dev, "%s: Clear pending interrupt", __func__);
ts->clear_penirq();
}
return IRQ_HANDLED;
}
static void tsc2007_stop(struct tsc2007 *ts)
{
ts->stopped = true;
mb();
wake_up(&ts->wait);
disable_irq(ts->irq);
}
static int tsc2007_open(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
int err;
ts->stopped = false;
mb();
enable_irq(ts->irq);
dev_dbg(&ts->client->dev, "%s: Executed\n", __func__);
/* Prepare for touch readings - power down ADC and enable PENIRQ */
err = tsc2007_xfer(ts, PWRDOWN);
if (err < 0) {
tsc2007_stop(ts);
return err;
}
return 0;
}
static void tsc2007_close(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
tsc2007_stop(ts);
}
#ifdef CONFIG_OF
static int tsc2007_get_pendown_state_gpio(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct tsc2007 *ts = i2c_get_clientdata(client);
return !gpio_get_value(ts->gpio);
}
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
struct device_node *np = client->dev.of_node;
u32 val32;
u64 val64;
if (!np) {
dev_err(&client->dev, "missing device tree data\n");
return -EINVAL;
}
if (!of_property_read_u32(np, "ti,max-rt", &val32))
ts->max_rt = val32;
else
ts->max_rt = MAX_12BIT;
if (!of_property_read_u32(np, "ti,fuzzx", &val32))
ts->fuzzx = val32;
if (!of_property_read_u32(np, "ti,fuzzy", &val32))
ts->fuzzy = val32;
if (!of_property_read_u32(np, "ti,fuzzz", &val32))
ts->fuzzz = val32;
if (!of_property_read_u64(np, "ti,poll-period", &val64))
ts->poll_period = val64;
else
ts->poll_period = 1;
if (!of_property_read_u32(np, "ti,x-plate-ohms", &val32)) {
ts->x_plate_ohms = val32;
} else {
dev_err(&client->dev, "missing ti,x-plate-ohms devicetree property.");
return -EINVAL;
}
ts->gpio = of_get_gpio(np, 0);
printk("ts->gpio = %d\n", ts->gpio);
if (gpio_is_valid(ts->gpio))
{
ts->get_pendown_state = tsc2007_get_pendown_state_gpio;
/* If GPIO is valid, then request the GPIO for use */
dev_dbg(&client->dev, "%s: Requesting GPIO", __func__);
if (gpio_request(ts->gpio, "nPENIRQ"))
{
//dev_dbg(&client->dev, "%s: Requesting GPIO failed", __func__);
return 0;
}
/* Set the direction to be input - may not be required */
dev_dbg(&client->dev, "%s: Setting direction for GPIO", __func__);
if (gpio_direction_input(ts->gpio))
{
gpio_free(ts->gpio);
return 0;
}
/* Set the debounce limit/value for the GPIO
//dev_dbg(&client->dev, "%s: Setting debounce for GPIO", __func__);
if (gpio_set_debounce(ts->gpio, 50000))
{
gpio_free(ts->gpio);
return 0;
}*/
}
else
dev_warn(&client->dev,
"GPIO not specified in DT (of_get_gpio returned %d)\n",
ts->gpio);
return 0;
}
#else
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
dev_err(&client->dev, "platform data is required!\n");
return -EINVAL;
}
#endif
static int tsc2007_probe_pdev(struct i2c_client *client, struct tsc2007 *ts,
const struct tsc2007_platform_data *pdata,
const struct i2c_device_id *id)
{
ts->model = pdata->model;
ts->x_plate_ohms = pdata->x_plate_ohms;
ts->max_rt = pdata->max_rt ? : MAX_12BIT;
ts->poll_period = pdata->poll_period ? : 1;
ts->get_pendown_state = pdata->get_pendown_state;
ts->clear_penirq = pdata->clear_penirq;
ts->fuzzx = pdata->fuzzx;
ts->fuzzy = pdata->fuzzy;
ts->fuzzz = pdata->fuzzz;
if (pdata->x_plate_ohms == 0) {
dev_err(&client->dev, "x_plate_ohms is not set up in platform data");
return -EINVAL;
}
return 0;
}
static void tsc2007_call_exit_platform_hw(void *data)
{
struct device *dev = data;
const struct tsc2007_platform_data *pdata = dev_get_platdata(dev);
pdata->exit_platform_hw();
}
static int tsc2007_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct tsc2007_platform_data *pdata = dev_get_platdata(&client->dev);
struct tsc2007 *ts;
struct input_dev *input_dev;
int err;
if (!i2c_check_functionality(client->adapter,
I2C_FUNC_SMBUS_READ_WORD_DATA))
return -EIO;
ts = devm_kzalloc(&client->dev, sizeof(struct tsc2007), GFP_KERNEL);
if (!ts)
return -ENOMEM;
if (pdata)
err = tsc2007_probe_pdev(client, ts, pdata, id);
else
err = tsc2007_probe_dt(client, ts);
if (err)
return err;
input_dev = devm_input_allocate_device(&client->dev);
if (!input_dev)
return -ENOMEM;
i2c_set_clientdata(client, ts);
ts->client = client;
/* map GPIO numbers to IRQ numbers */
client->irq = gpio_to_irq(ts->gpio);
ts->irq = client->irq;
dev_dbg(&client->dev, "%s: IRQ number is %d", __func__, ts->irq);
ts->input = input_dev;
init_waitqueue_head(&ts->wait);
snprintf(ts->phys, sizeof(ts->phys),
"%s/input0", dev_name(&client->dev));
input_dev->name = "TSC2007 Touchscreen";
input_dev->phys = ts->phys;
input_dev->id.bustype = BUS_I2C;
input_dev->open = tsc2007_open;
input_dev->close = tsc2007_close;
input_set_drvdata(input_dev, ts);
input_dev->evbit[0] = BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
input_dev->keybit[BIT_WORD(BTN_TOUCH)] = BIT_MASK(BTN_TOUCH);
input_set_abs_params(input_dev, ABS_X, 0, MAX_12BIT, ts->fuzzx, 0);
input_set_abs_params(input_dev, ABS_Y, 0, MAX_12BIT, ts->fuzzy, 0);
input_set_abs_params(input_dev, ABS_PRESSURE, 0, MAX_12BIT,
ts->fuzzz, 0);
if (pdata) {
if (pdata->exit_platform_hw) {
err = devm_add_action(&client->dev,
tsc2007_call_exit_platform_hw,
&client->dev);
if (err) {
dev_err(&client->dev,
"Failed to register exit_platform_hw action, %d\n",
err);
return err;
}
}
if (pdata->init_platform_hw)
pdata->init_platform_hw();
}
err = devm_request_threaded_irq(&client->dev, ts->irq,
tsc2007_hard_irq, tsc2007_soft_irq,
IRQF_TRIGGER_FALLING /*| IRQF_TRIGGER_RISING | IRQF_ONESHOT*/,
client->dev.driver->name, ts);
if (err) {
dev_err(&client->dev, "Failed to request irq %d: %d\n",
ts->irq, err);
return err;
}
tsc2007_stop(ts);
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"Failed to register input device: %d\n", err);
return err;
}
return 0;
}
static const struct i2c_device_id tsc2007_idtable[] = {
{ "tsc2007", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, tsc2007_idtable);
#ifdef CONFIG_OF
static const struct of_device_id tsc2007_of_match[] = {
{ .compatible = "ti,tsc2007" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, tsc2007_of_match);
#endif
static struct i2c_driver tsc2007_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "tsc2007",
.of_match_table = of_match_ptr(tsc2007_of_match),
},
.id_table = tsc2007_idtable,
.probe = tsc2007_probe,
};
module_i2c_driver(tsc2007_driver);
MODULE_AUTHOR("Kwangwoo Lee <kwlee@mtekvision.com>");
MODULE_DESCRIPTION("TSC2007 TouchScreen Driver");
MODULE_LICENSE("GPL");离线
楼主 #7 2018-06-05 18:50:48 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
/*
* drivers/input/touchscreen/tsc2007.c
*
* Copyright (c) 2008 MtekVision Co., Ltd.
* Kwangwoo Lee <kwlee@mtekvision.com>
*
* Using code from:
* - ads7846.c
* Copyright (c) 2005 David Brownell
* Copyright (c) 2006 Nokia Corporation
* - corgi_ts.c
* Copyright (C) 2004-2005 Richard Purdie
* - omap_ts.[hc], ads7846.h, ts_osk.c
* Copyright (C) 2002 MontaVista Software
* Copyright (C) 2004 Texas Instruments
* Copyright (C) 2005 Dirk Behme
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/i2c.h>
#include <linux/of_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/platform_data/tsc2007.h>
#include "tsc2007.h"
int tsc2007_xfer(struct tsc2007 *tsc, u8 cmd)
{
s32 data;
u16 val;
data = i2c_smbus_read_word_data(tsc->client, cmd);
if (data < 0) {
dev_err(&tsc->client->dev, "i2c io error: %d\n", data);
return data;
}
/* The protocol and raw data format from i2c interface:
* S Addr Wr [A] Comm [A] S Addr Rd [A] [DataLow] A [DataHigh] NA P
* Where DataLow has [D11-D4], DataHigh has [D3-D0 << 4 | Dummy 4bit].
*/
val = swab16(data) >> 4;
dev_dbg(&tsc->client->dev, "data: 0x%x, val: 0x%x\n", data, val);
return val;
}
static void tsc2007_read_values(struct tsc2007 *tsc, struct ts_event *tc)
{
/* y- still on; turn on only y+ (and ADC) */
tc->y = tsc2007_xfer(tsc, READ_Y);
/* turn y- off, x+ on, then leave in lowpower */
tc->x = tsc2007_xfer(tsc, READ_X);
/* turn y+ off, x- on; we'll use formula #1 */
tc->z1 = tsc2007_xfer(tsc, READ_Z1);
tc->z2 = tsc2007_xfer(tsc, READ_Z2);
/* Prepare for next touch reading - power down ADC, enable PENIRQ */
tsc2007_xfer(tsc, PWRDOWN);
}
u32 tsc2007_calculate_pressure(struct tsc2007 *tsc, struct ts_event *tc)
{
u32 rt = 0;
/* range filtering */
if (tc->x == MAX_12BIT)
tc->x = 0;
if (likely(tc->x && tc->z1)) {
/* compute touch pressure resistance using equation #1 */
rt = tc->z2 - tc->z1;
rt *= tc->x;
rt *= tsc->x_plate_ohms;
rt /= tc->z1;
rt = (rt + 2047) >> 12;
}
return rt;
}
bool tsc2007_is_pen_down(struct tsc2007 *ts)
{
/*
* NOTE: We can't rely on the pressure to determine the pen down
* state, even though this controller has a pressure sensor.
* The pressure value can fluctuate for quite a while after
* lifting the pen and in some cases may not even settle at the
* expected value.
*
* The only safe way to check for the pen up condition is in the
* work function by reading the pen signal state (it's a GPIO
* and IRQ). Unfortunately such callback is not always available,
* in that case we assume that the pen is down and expect caller
* to fall back on the pressure reading.
*/
if (!ts->get_pendown_state)
return true;
return ts->get_pendown_state(&ts->client->dev);
}
static irqreturn_t tsc2007_soft_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
struct input_dev *input = ts->input;
struct ts_event tc;
u32 rt;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
while (!ts->stopped && tsc2007_is_pen_down(ts)) {
/* pen is down, continue with the measurement */
tsc2007_read_values(ts, &tc);
rt = tsc2007_calculate_pressure(ts, &tc);
if (!rt && !ts->get_pendown_state) {
/*
* If pressure reported is 0 and we don't have
* callback to check pendown state, we have to
* assume that pen was lifted up.
*/
break;
}
if (rt <= ts->max_rt) {
dev_dbg(&ts->client->dev,
"DOWN point(%4d,%4d), pressure (%4u)\n",
tc.x, tc.y, rt);
input_report_key(input, BTN_TOUCH, 1);
input_report_abs(input, ABS_X, tc.x);
input_report_abs(input, ABS_Y, tc.y);
input_report_abs(input, ABS_PRESSURE, rt);
input_sync(input);
} else {
/*
* Sample found inconsistent by debouncing or pressure is
* beyond the maximum. Don't report it to user space,
* repeat at least once more the measurement.
*/
dev_dbg(&ts->client->dev, "ignored pressure %d\n", rt);
}
wait_event_timeout(ts->wait, ts->stopped,
msecs_to_jiffies(10)); /* ts->poll_period */
}
//dev_dbg(&ts->client->dev, "UP\n");
dev_dbg(&ts->client->dev, "UP\n");
input_report_key(input, BTN_TOUCH, 0);
input_report_abs(input, ABS_PRESSURE, 0);
input_sync(input);
if (ts->clear_penirq)
ts->clear_penirq();
/* Now that the touch has been handled, re-enabled the PENIRQ */
enable_irq(ts->irq);
return IRQ_HANDLED;
}
static irqreturn_t tsc2007_hard_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
if (tsc2007_is_pen_down(ts))
{
/* Once the IRQ handling starts, disable the interrupt */
disable_irq_nosync(ts->irq);
dev_dbg(&ts->client->dev, "%s: Pen down returns true\n", __func__);
return IRQ_WAKE_THREAD;
}
if (ts->clear_penirq)
{
dev_dbg(&ts->client->dev, "%s: Clear pending interrupt", __func__);
ts->clear_penirq();
}
return IRQ_HANDLED;
}
static void tsc2007_stop(struct tsc2007 *ts)
{
ts->stopped = true;
mb();
wake_up(&ts->wait);
disable_irq(ts->irq);
}
static int tsc2007_open(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
int err;
ts->stopped = false;
mb();
enable_irq(ts->irq);
dev_dbg(&ts->client->dev, "%s: Executed\n", __func__);
/* Prepare for touch readings - power down ADC and enable PENIRQ */
err = tsc2007_xfer(ts, PWRDOWN);
if (err < 0) {
tsc2007_stop(ts);
return err;
}
return 0;
}
static void tsc2007_close(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
tsc2007_stop(ts);
}
#ifdef CONFIG_OF
static int tsc2007_get_pendown_state_gpio(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct tsc2007 *ts = i2c_get_clientdata(client);
return !gpio_get_value(ts->gpio);
}
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
struct device_node *np = client->dev.of_node;
u32 val32;
u64 val64;
if (!np) {
dev_err(&client->dev, "missing device tree data\n");
return -EINVAL;
}
if (!of_property_read_u32(np, "ti,max-rt", &val32))
ts->max_rt = val32;
else
ts->max_rt = MAX_12BIT;
if (!of_property_read_u32(np, "ti,fuzzx", &val32))
ts->fuzzx = val32;
if (!of_property_read_u32(np, "ti,fuzzy", &val32))
ts->fuzzy = val32;
if (!of_property_read_u32(np, "ti,fuzzz", &val32))
ts->fuzzz = val32;
if (!of_property_read_u64(np, "ti,poll-period", &val64))
ts->poll_period = val64;
else
ts->poll_period = 1;
if (!of_property_read_u32(np, "ti,x-plate-ohms", &val32)) {
ts->x_plate_ohms = val32;
} else {
dev_err(&client->dev, "missing ti,x-plate-ohms devicetree property.");
return -EINVAL;
}
ts->gpio = of_get_gpio(np, 0);
if (gpio_is_valid(ts->gpio))
ts->get_pendown_state = tsc2007_get_pendown_state_gpio;
else
dev_warn(&client->dev,
"GPIO not specified in DT (of_get_gpio returned %d)\n",
ts->gpio);
return 0;
}
#else
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
dev_err(&client->dev, "platform data is required!\n");
return -EINVAL;
}
#endif
static int tsc2007_probe_pdev(struct i2c_client *client, struct tsc2007 *ts,
const struct tsc2007_platform_data *pdata,
const struct i2c_device_id *id)
{
ts->model = pdata->model;
ts->x_plate_ohms = pdata->x_plate_ohms;
ts->max_rt = pdata->max_rt ? : MAX_12BIT;
ts->poll_period = pdata->poll_period ? : 1;
ts->get_pendown_state = pdata->get_pendown_state;
ts->clear_penirq = pdata->clear_penirq;
ts->fuzzx = pdata->fuzzx;
ts->fuzzy = pdata->fuzzy;
ts->fuzzz = pdata->fuzzz;
if (pdata->x_plate_ohms == 0) {
dev_err(&client->dev, "x_plate_ohms is not set up in platform data");
return -EINVAL;
}
return 0;
}
static void tsc2007_call_exit_platform_hw(void *data)
{
struct device *dev = data;
const struct tsc2007_platform_data *pdata = dev_get_platdata(dev);
pdata->exit_platform_hw();
}
static int tsc2007_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct tsc2007_platform_data *pdata = dev_get_platdata(&client->dev);
struct tsc2007 *ts;
struct input_dev *input_dev;
int err;
if (!i2c_check_functionality(client->adapter,
I2C_FUNC_SMBUS_READ_WORD_DATA))
return -EIO;
ts = devm_kzalloc(&client->dev, sizeof(struct tsc2007), GFP_KERNEL);
if (!ts)
return -ENOMEM;
if (pdata)
err = tsc2007_probe_pdev(client, ts, pdata, id);
else
err = tsc2007_probe_dt(client, ts);
if (err)
return err;
input_dev = devm_input_allocate_device(&client->dev);
if (!input_dev)
return -ENOMEM;
i2c_set_clientdata(client, ts);
ts->client = client;
/* map GPIO numbers to IRQ numbers */
client->irq = gpio_to_irq(ts->gpio);
ts->irq = client->irq;
dev_dbg(&client->dev, "%s: IRQ number is %d", __func__, ts->irq);
ts->input = input_dev;
init_waitqueue_head(&ts->wait);
snprintf(ts->phys, sizeof(ts->phys),
"%s/input0", dev_name(&client->dev));
input_dev->name = "TSC2007 Touchscreen";
input_dev->phys = ts->phys;
input_dev->id.bustype = BUS_I2C;
input_dev->open = tsc2007_open;
input_dev->close = tsc2007_close;
input_set_drvdata(input_dev, ts);
input_dev->evbit[0] = BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
input_dev->keybit[BIT_WORD(BTN_TOUCH)] = BIT_MASK(BTN_TOUCH);
input_set_abs_params(input_dev, ABS_X, 0, MAX_12BIT, ts->fuzzx, 0);
input_set_abs_params(input_dev, ABS_Y, 0, MAX_12BIT, ts->fuzzy, 0);
input_set_abs_params(input_dev, ABS_PRESSURE, 0, MAX_12BIT,
ts->fuzzz, 0);
if (pdata) {
if (pdata->exit_platform_hw) {
err = devm_add_action(&client->dev,
tsc2007_call_exit_platform_hw,
&client->dev);
if (err) {
dev_err(&client->dev,
"Failed to register exit_platform_hw action, %d\n",
err);
return err;
}
}
if (pdata->init_platform_hw)
pdata->init_platform_hw();
}
err = devm_request_threaded_irq(&client->dev, ts->irq,
tsc2007_hard_irq, tsc2007_soft_irq,
IRQF_TRIGGER_FALLING /*| IRQF_TRIGGER_RISING | IRQF_ONESHOT*/,
client->dev.driver->name, ts);
if (err) {
dev_err(&client->dev, "Failed to request irq %d: %d\n",
ts->irq, err);
return err;
}
tsc2007_stop(ts);
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"Failed to register input device: %d\n", err);
return err;
}
return 0;
}
static const struct i2c_device_id tsc2007_idtable[] = {
{ "tsc2007", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, tsc2007_idtable);
#ifdef CONFIG_OF
static const struct of_device_id tsc2007_of_match[] = {
{ .compatible = "ti,tsc2007" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, tsc2007_of_match);
#endif
static struct i2c_driver tsc2007_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "tsc2007",
.of_match_table = of_match_ptr(tsc2007_of_match),
},
.id_table = tsc2007_idtable,
.probe = tsc2007_probe,
};
module_i2c_driver(tsc2007_driver);
MODULE_AUTHOR("Kwangwoo Lee <kwlee@mtekvision.com>");
MODULE_DESCRIPTION("TSC2007 TouchScreen Driver");
MODULE_LICENSE("GPL");离线
楼主 #8 2018-06-05 18:56:30 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
/*
* drivers/input/touchscreen/tsc2007.c
*
* Copyright (c) 2008 MtekVision Co., Ltd.
* Kwangwoo Lee <kwlee@mtekvision.com>
*
* Using code from:
* - ads7846.c
* Copyright (c) 2005 David Brownell
* Copyright (c) 2006 Nokia Corporation
* - corgi_ts.c
* Copyright (C) 2004-2005 Richard Purdie
* - omap_ts.[hc], ads7846.h, ts_osk.c
* Copyright (C) 2002 MontaVista Software
* Copyright (C) 2004 Texas Instruments
* Copyright (C) 2005 Dirk Behme
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/i2c.h>
#include <linux/of_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/platform_data/tsc2007.h>
#include "tsc2007.h"
int tsc2007_xfer(struct tsc2007 *tsc, u8 cmd)
{
s32 data;
u16 val;
data = i2c_smbus_read_word_data(tsc->client, cmd);
if (data < 0) {
dev_err(&tsc->client->dev, "i2c io error: %d\n", data);
return data;
}
/* The protocol and raw data format from i2c interface:
* S Addr Wr [A] Comm [A] S Addr Rd [A] [DataLow] A [DataHigh] NA P
* Where DataLow has [D11-D4], DataHigh has [D3-D0 << 4 | Dummy 4bit].
*/
val = swab16(data) >> 4;
dev_dbg(&tsc->client->dev, "data: 0x%x, val: 0x%x\n", data, val);
return val;
}
static void tsc2007_read_values(struct tsc2007 *tsc, struct ts_event *tc)
{
/* y- still on; turn on only y+ (and ADC) */
tc->y = tsc2007_xfer(tsc, READ_Y);
/* turn y- off, x+ on, then leave in lowpower */
tc->x = tsc2007_xfer(tsc, READ_X);
/* turn y+ off, x- on; we'll use formula #1 */
tc->z1 = tsc2007_xfer(tsc, READ_Z1);
tc->z2 = tsc2007_xfer(tsc, READ_Z2);
/* Prepare for next touch reading - power down ADC, enable PENIRQ */
tsc2007_xfer(tsc, PWRDOWN);
}
u32 tsc2007_calculate_pressure(struct tsc2007 *tsc, struct ts_event *tc)
{
u32 rt = 0;
/* range filtering */
if (tc->x == MAX_12BIT)
tc->x = 0;
if (likely(tc->x && tc->z1)) {
/* compute touch pressure resistance using equation #1 */
rt = tc->z2 - tc->z1;
rt *= tc->x;
rt *= tsc->x_plate_ohms;
rt /= tc->z1;
rt = (rt + 2047) >> 12;
}
return rt;
}
bool tsc2007_is_pen_down(struct tsc2007 *ts)
{
/*
* NOTE: We can't rely on the pressure to determine the pen down
* state, even though this controller has a pressure sensor.
* The pressure value can fluctuate for quite a while after
* lifting the pen and in some cases may not even settle at the
* expected value.
*
* The only safe way to check for the pen up condition is in the
* work function by reading the pen signal state (it's a GPIO
* and IRQ). Unfortunately such callback is not always available,
* in that case we assume that the pen is down and expect caller
* to fall back on the pressure reading.
*/
if (!ts->get_pendown_state)
return true;
return ts->get_pendown_state(&ts->client->dev);
}
static irqreturn_t tsc2007_soft_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
struct input_dev *input = ts->input;
struct ts_event tc;
u32 rt;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
while (!ts->stopped && tsc2007_is_pen_down(ts)) {
/* pen is down, continue with the measurement */
tsc2007_read_values(ts, &tc);
rt = tsc2007_calculate_pressure(ts, &tc);
if (!rt && !ts->get_pendown_state) {
/*
* If pressure reported is 0 and we don't have
* callback to check pendown state, we have to
* assume that pen was lifted up.
*/
break;
}
if (rt <= ts->max_rt) {
dev_dbg(&ts->client->dev,
"DOWN point(%4d,%4d), pressure (%4u)\n",
tc.x, tc.y, rt);
input_report_key(input, BTN_TOUCH, 1);
input_report_abs(input, ABS_X, tc.x);
input_report_abs(input, ABS_Y, tc.y);
input_report_abs(input, ABS_PRESSURE, rt);
input_sync(input);
} else {
/*
* Sample found inconsistent by debouncing or pressure is
* beyond the maximum. Don't report it to user space,
* repeat at least once more the measurement.
*/
dev_dbg(&ts->client->dev, "ignored pressure %d\n", rt);
}
wait_event_timeout(ts->wait, ts->stopped,
msecs_to_jiffies(10)); /* ts->poll_period */
}
//dev_dbg(&ts->client->dev, "UP\n");
dev_dbg(&ts->client->dev, "UP\n");
input_report_key(input, BTN_TOUCH, 0);
input_report_abs(input, ABS_PRESSURE, 0);
input_sync(input);
if (ts->clear_penirq)
ts->clear_penirq();
/* Now that the touch has been handled, re-enabled the PENIRQ */
enable_irq(ts->irq);
return IRQ_HANDLED;
}
static irqreturn_t tsc2007_hard_irq(int irq, void *handle)
{
struct tsc2007 *ts = handle;
dev_dbg(&ts->client->dev, "%s: Entering\n", __func__);
if (tsc2007_is_pen_down(ts))
{
/* Once the IRQ handling starts, disable the interrupt */
disable_irq_nosync(ts->irq);
dev_dbg(&ts->client->dev, "%s: Pen down returns true\n", __func__);
return IRQ_WAKE_THREAD;
}
if (ts->clear_penirq)
{
dev_dbg(&ts->client->dev, "%s: Clear pending interrupt", __func__);
ts->clear_penirq();
}
return IRQ_HANDLED;
}
static void tsc2007_stop(struct tsc2007 *ts)
{
ts->stopped = true;
mb();
wake_up(&ts->wait);
disable_irq(ts->irq);
}
static int tsc2007_open(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
int err;
ts->stopped = false;
mb();
enable_irq(ts->irq);
dev_dbg(&ts->client->dev, "%s: Executed\n", __func__);
/* Prepare for touch readings - power down ADC and enable PENIRQ */
err = tsc2007_xfer(ts, PWRDOWN);
if (err < 0) {
tsc2007_stop(ts);
return err;
}
return 0;
}
static void tsc2007_close(struct input_dev *input_dev)
{
struct tsc2007 *ts = input_get_drvdata(input_dev);
tsc2007_stop(ts);
}
#ifdef CONFIG_OF
static int tsc2007_get_pendown_state_gpio(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct tsc2007 *ts = i2c_get_clientdata(client);
return !gpio_get_value(ts->gpio);
}
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
struct device_node *np = client->dev.of_node;
u32 val32;
u64 val64;
if (!np) {
dev_err(&client->dev, "missing device tree data\n");
return -EINVAL;
}
if (!of_property_read_u32(np, "ti,max-rt", &val32))
ts->max_rt = val32;
else
ts->max_rt = MAX_12BIT;
if (!of_property_read_u32(np, "ti,fuzzx", &val32))
ts->fuzzx = val32;
if (!of_property_read_u32(np, "ti,fuzzy", &val32))
ts->fuzzy = val32;
if (!of_property_read_u32(np, "ti,fuzzz", &val32))
ts->fuzzz = val32;
if (!of_property_read_u64(np, "ti,poll-period", &val64))
ts->poll_period = val64;
else
ts->poll_period = 1;
if (!of_property_read_u32(np, "ti,x-plate-ohms", &val32)) {
ts->x_plate_ohms = val32;
} else {
dev_err(&client->dev, "missing ti,x-plate-ohms devicetree property.");
return -EINVAL;
}
ts->gpio = of_get_gpio(np, 0);
if (gpio_is_valid(ts->gpio))
ts->get_pendown_state = tsc2007_get_pendown_state_gpio;
else
dev_warn(&client->dev,
"GPIO not specified in DT (of_get_gpio returned %d)\n",
ts->gpio);
return 0;
}
#else
static int tsc2007_probe_dt(struct i2c_client *client, struct tsc2007 *ts)
{
dev_err(&client->dev, "platform data is required!\n");
return -EINVAL;
}
#endif
static int tsc2007_probe_pdev(struct i2c_client *client, struct tsc2007 *ts,
const struct tsc2007_platform_data *pdata,
const struct i2c_device_id *id)
{
ts->model = pdata->model;
ts->x_plate_ohms = pdata->x_plate_ohms;
ts->max_rt = pdata->max_rt ? : MAX_12BIT;
ts->poll_period = pdata->poll_period ? : 1;
ts->get_pendown_state = pdata->get_pendown_state;
ts->clear_penirq = pdata->clear_penirq;
ts->fuzzx = pdata->fuzzx;
ts->fuzzy = pdata->fuzzy;
ts->fuzzz = pdata->fuzzz;
if (pdata->x_plate_ohms == 0) {
dev_err(&client->dev, "x_plate_ohms is not set up in platform data");
return -EINVAL;
}
return 0;
}
static void tsc2007_call_exit_platform_hw(void *data)
{
struct device *dev = data;
const struct tsc2007_platform_data *pdata = dev_get_platdata(dev);
pdata->exit_platform_hw();
}
static int tsc2007_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct tsc2007_platform_data *pdata = dev_get_platdata(&client->dev);
struct tsc2007 *ts;
struct input_dev *input_dev;
int err;
if (!i2c_check_functionality(client->adapter,
I2C_FUNC_SMBUS_READ_WORD_DATA))
return -EIO;
ts = devm_kzalloc(&client->dev, sizeof(struct tsc2007), GFP_KERNEL);
if (!ts)
return -ENOMEM;
if (pdata)
err = tsc2007_probe_pdev(client, ts, pdata, id);
else
err = tsc2007_probe_dt(client, ts);
if (err)
return err;
input_dev = devm_input_allocate_device(&client->dev);
if (!input_dev)
return -ENOMEM;
i2c_set_clientdata(client, ts);
ts->client = client;
/* map GPIO numbers to IRQ numbers */
client->irq = gpio_to_irq(ts->gpio);
ts->irq = client->irq;
dev_dbg(&client->dev, "%s: IRQ number is %d", __func__, ts->irq);
ts->input = input_dev;
init_waitqueue_head(&ts->wait);
snprintf(ts->phys, sizeof(ts->phys),
"%s/input0", dev_name(&client->dev));
input_dev->name = "TSC2007 Touchscreen";
input_dev->phys = ts->phys;
input_dev->id.bustype = BUS_I2C;
input_dev->open = tsc2007_open;
input_dev->close = tsc2007_close;
input_set_drvdata(input_dev, ts);
input_dev->evbit[0] = BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
input_dev->keybit[BIT_WORD(BTN_TOUCH)] = BIT_MASK(BTN_TOUCH);
input_set_abs_params(input_dev, ABS_X, 0, MAX_12BIT, ts->fuzzx, 0);
input_set_abs_params(input_dev, ABS_Y, 0, MAX_12BIT, ts->fuzzy, 0);
input_set_abs_params(input_dev, ABS_PRESSURE, 0, MAX_12BIT,
ts->fuzzz, 0);
if (pdata) {
if (pdata->exit_platform_hw) {
err = devm_add_action(&client->dev,
tsc2007_call_exit_platform_hw,
&client->dev);
if (err) {
dev_err(&client->dev,
"Failed to register exit_platform_hw action, %d\n",
err);
return err;
}
}
if (pdata->init_platform_hw)
pdata->init_platform_hw();
}
err = devm_request_threaded_irq(&client->dev, ts->irq,
tsc2007_hard_irq, tsc2007_soft_irq,
IRQF_TRIGGER_FALLING /*| IRQF_TRIGGER_RISING | IRQF_ONESHOT*/,
client->dev.driver->name, ts);
if (err) {
dev_err(&client->dev, "Failed to request irq %d: %d\n",
ts->irq, err);
return err;
}
tsc2007_stop(ts);
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"Failed to register input device: %d\n", err);
return err;
}
return 0;
}
static const struct i2c_device_id tsc2007_idtable[] = {
{ "tsc2007", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, tsc2007_idtable);
#ifdef CONFIG_OF
static const struct of_device_id tsc2007_of_match[] = {
{ .compatible = "ti,tsc2007" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, tsc2007_of_match);
#endif
static struct i2c_driver tsc2007_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "tsc2007",
.of_match_table = of_match_ptr(tsc2007_of_match),
},
.id_table = tsc2007_idtable,
.probe = tsc2007_probe,
};
module_i2c_driver(tsc2007_driver);
MODULE_AUTHOR("Kwangwoo Lee <kwlee@mtekvision.com>");
MODULE_DESCRIPTION("TSC2007 TouchScreen Driver");
MODULE_LICENSE("GPL");最后修改,基本不抱什么希望了.
离线
楼主 #9 2018-06-06 09:13:07 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
离线
楼主 #10 2018-06-06 09:21:38 分享评论
楼主 #11 2018-06-06 17:56:39 分享评论
楼主 #12 2018-06-06 18:12:11 分享评论
楼主 #13 2018-06-06 18:39:07 分享评论
楼主 #14 2018-06-06 20:32:00 分享评论
楼主 #15 2018-06-08 11:54:17 分享评论
楼主 #16 2018-06-08 11:56:40 分享评论
楼主 #18 2018-06-11 22:28:27 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
tom wrote:
触摸ad一般要做滤波的,不滤波效果是很差。有没有试过用tslib?
linux下应用层有用 tslib,
但是发现 V3s 主线上的 ns2009 驱动有问题,
我的修改思路是,
检测到压力寄存器超过 0x80,
那么先采集两次x,y扔掉,
再采集10次x,y, 去掉两个最大值,去掉两个最小值, 中间求平均。
但是发现,经常有飞点,这种飞点有时候会出来7,8个,
已经干扰系统运行了。
现在想到的办法是记录上一次的时间戳(jiffies)和xy, 如果时间戳很近并且两点距离很远的点直接抛弃。
离线
楼主 #20 2018-07-20 16:57:42 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
离线
楼主 #22 2018-07-20 21:40:30 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
离线
楼主 #24 2019-01-13 19:47:40 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: ns2009触摸芯片太**了,出来的原始数据偶尔经常出现大偏差,戳东出西,TI的I2C触摸芯片TSC2007价格吓人,只好用新唐单片机模拟
giantt wrote:
晕哥 wrote:
john78 wrote:
哦,那我也用这个芯片了。呵呵,跟着吃螃蟹。
这个是荔枝派zero开发板的触摸屏驱动程序,驱动是现成的,不用吃螃蟹,改进优化一下就可以了。
大神,您好,您修改好的,ns2009驱动,可以分享一下给我学习一下吗?本人小白,正在学习这方面知识
这个是 。。。。 你懂的
你到时候有什么问题, 直接发上来看看
后来我想想, 应该是当时 tslib 静态链接造成的, 没有正确使用 tslib 的插件。
因为 tslib 里面本身自带了各种滤波器插件, 所以你不用改任何代码,但是我一直没有来得及验证这个想法
离线
楼主 #27 2019-01-16 15:10:35 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
离线
东莞哇酷科技有限公司开发