楼主 #1 2018-09-27 15:56:49 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
设置PWM参数

这个PWM参数配置的sysfs里使能具体指的是哪个文件了
离线
楼主 #3 2018-09-27 16:06:14 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
/sys/class/pwm/pwmchip0/pwm0/enable
我搜了下 没有这个文件路径 而且在jffs2.img中也没有 了 ![]()
离线
楼主 #5 2018-09-27 16:33:01 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
你要执行 echo 0 > /sys/class/pwm/pwmchip0/export
主要是 我的Pwm下面没有pwmchip0这个了 就是就一个空目录了
离线
楼主 #7 2018-09-27 16:49:34 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
检查一下驱动有没有使能 SUNXI 的 pwm
检查dts有没有配置pwm
我是配置下面截图 是按着文档去配置的
这个是配置sun8i-v3s.dtsi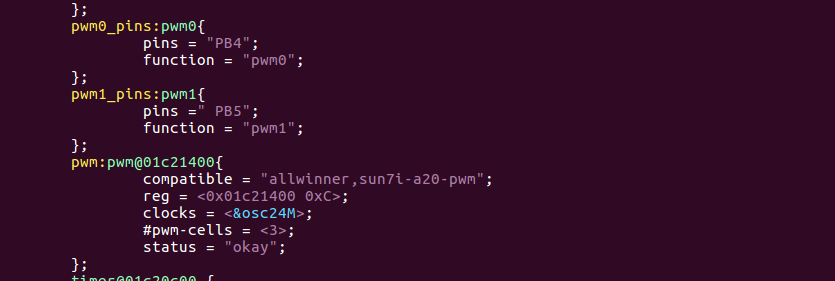
sun8i-v3s-licheepi-zero.dts的配置 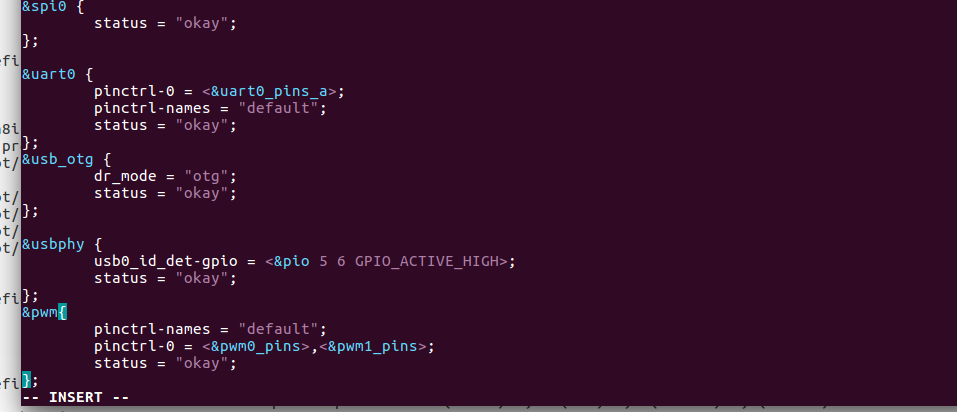
离线
楼主 #10 2018-09-27 17:18:53 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
mount -t sysfs sysfs /sys
参考: https://www.kernel.org/doc/Documentation/filesystems/sysfs.txt
我是没有挂载 ,你说说的那些sysfs/sys 只有Linux内核中的fs里面有这个 但是sysfs 这个虚拟文件系统 具体是指的哪个目录下?找不到目录文件
最近编辑记录 无情一刀 (2018-09-27 17:23:17)
离线
楼主 #11 2018-09-27 17:22:33 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
我这里修改的dts喝dtsi都是在u-boot里面修改的
离线
楼主 #13 2018-09-27 20:41:53 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
无情一刀 wrote:
我这里修改的dts喝dtsi都是在u-boot里面修改的
改 u-boot 的没有用的, 一定要改 kernel 的 dts/dtsi 才行, 还有 mount sysfs 也是不能少哦。
我去挂载的时候提示我已经挂载了 但是我输入echo 0 > /sys/class/pwm/pwmchip0/export
这里pwm的目录下是空的
最近编辑记录 无情一刀 (2018-09-27 20:43:29)
离线
楼主 #15 2018-09-28 08:50:55 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
是不是 linux 没开 sunxi 的 pwm 驱动?
你说的menuconfig里面已经设置了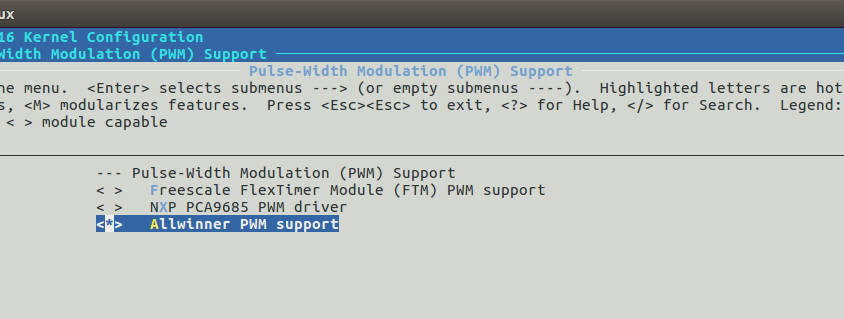
离线
楼主 #17 2018-09-28 09:36:18 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
命令行执行
mdev -s
然后看下有没有 /sys/class/pwm/pwmchip0/export 这些文件

离线
楼主 #19 2018-09-28 09:48:40 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
mdev -s 是在 嵌入式linux控制台下执行.
关键我在Linux的menuconfig 中配置了使能 就应该会调用下面截图的这个PWM驱动 里面是有创建pwmchip0X,,应该就是这个驱动没有调用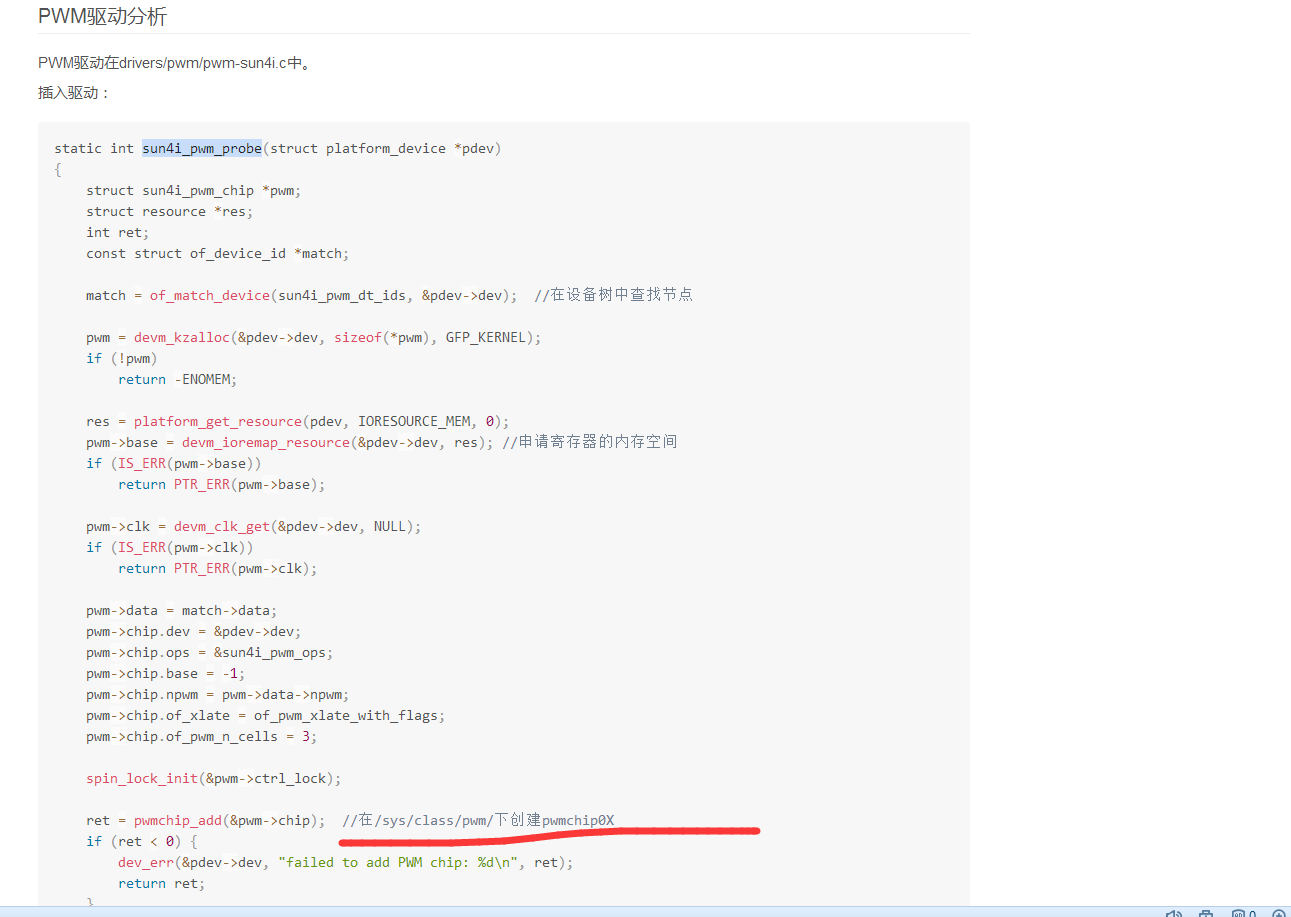
离线
楼主 #20 2018-09-28 09:53:46 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
无情一刀 wrote:
晕哥 wrote:
mdev -s 是在 嵌入式linux控制台下执行.
关键我在Linux的menuconfig 中配置了使能 就应该会调用下面截图的这个PWM驱动 里面是有创建pwmchip0X,,应该就是这个驱动没有调用
/files/members/1116/pwm_20180927-2146.png
我刚才也试过了 在目录下面也是没有
离线
楼主 #22 2018-09-28 11:24:10 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
看 13 楼的图片,为什么是在 ubuntu (电脑?)挂载 sysfs ?为什么不是在V3s嵌入式设备?
我这边在终端这边是挂载不上的 但是在虚拟机里面去挂载跟文件系统中 然后去mkfs他是报错的 不是很明白了
我在虚拟机里面测试区挂载了下 pwm在sys里面的哪个pwm目录也是空的
最近编辑记录 无情一刀 (2018-09-28 11:35:11)
离线
#23 2018-09-28 11:37:11 分享评论
- 晕哥
- 管理员

- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
无情一刀 wrote:
晕哥 wrote:
看 13 楼的图片,为什么是在 ubuntu (电脑?)挂载 sysfs ?为什么不是在V3s嵌入式设备?
我这边在终端这边是挂载不上的 但是在虚拟机里面去挂载跟文件系统中 然后去mkfs他是报错的 不是很明白了
我在虚拟机里面测试区挂载了下 pwm在sys里面的哪个pwm目录也是空的
你的虚拟机当然已经挂载了sysfs, 无需你再操作了。
终端这边是挂载不上的, 是如何挂不上的?错误呢?
离线
楼主 #24 2018-09-28 11:38:19 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
无情一刀 wrote:
晕哥 wrote:
看 13 楼的图片,为什么是在 ubuntu (电脑?)挂载 sysfs ?为什么不是在V3s嵌入式设备?
我这边在终端这边是挂载不上的 但是在虚拟机里面去挂载跟文件系统中 然后去mkfs他是报错的 不是很明白了
我在虚拟机里面测试区挂载了下 pwm在sys里面的哪个pwm目录也是空的你的虚拟机当然已经挂载了sysfs, 无需你再操作了。
终端这边是挂载不上的, 是如何挂不上的?错误呢?
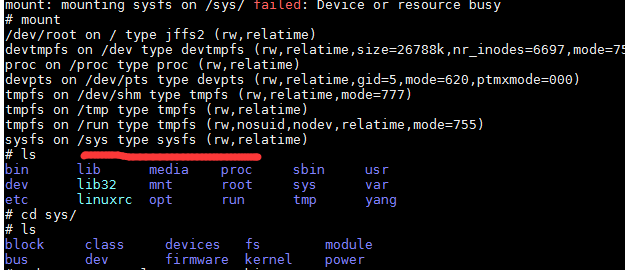
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
mdev -s
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
#
离线
#25 2018-09-28 11:53:25 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
无情一刀 wrote:
晕哥 wrote:
无情一刀 wrote:
我这边在终端这边是挂载不上的 但是在虚拟机里面去挂载跟文件系统中 然后去mkfs他是报错的 不是很明白了
我在虚拟机里面测试区挂载了下 pwm在sys里面的哪个pwm目录也是空的你的虚拟机当然已经挂载了sysfs, 无需你再操作了。
终端这边是挂载不上的, 是如何挂不上的?错误呢?
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
mdev -s
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
#
酱紫:
mkdir -p /sys/
mount -t sysfs sysfs /sys
离线
楼主 #26 2018-09-28 11:54:51 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
无情一刀 wrote:
晕哥 wrote:
你的虚拟机当然已经挂载了sysfs, 无需你再操作了。
终端这边是挂载不上的, 是如何挂不上的?错误呢?
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
mdev -s
mount -t sysfs sysfs ./sys/
mount: mounting sysfs on ./sys/ failed: Device or resource busy
#酱紫:
mkdir -p /sys/
mount -t sysfs sysfs /sys
我这里用mount看了所有挂载的 已经挂载上了 但是就是里面pwm目录里面啥都没有
离线
楼主 #28 2018-09-28 13:42:39 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
那酱紫, 先卸载,再挂载,看看什么情况:
umount /sys
mkdir -p /sys
mount -t sysfs sysfs /sys
还是一样的 进入pwm目录下什么都没有
离线
#29 2018-09-28 13:48:52 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
这个好像没办法解释了.
http://zero.lichee.pro/%E9%A9%B1%E5%8A%A8/PWM.html
看下 static int sun4i_pwm_probe(struct platform_device *pdev) 这个函数有没有输出,
初步怀疑你改错dts文件,或者烧错设备树(dtb)文件了,
确认一定是要改 linux kernel目录下的 dts/dtsi 文件,而不是 u-boot 的 dts/dtsi 文件哦。
离线
楼主 #30 2018-09-28 13:59:33 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
这个好像没办法解释了.
http://zero.lichee.pro/%E9%A9%B1%E5%8A%A8/PWM.html
看下 static int sun4i_pwm_probe(struct platform_device *pdev) 这个函数有没有输出,
初步怀疑你改错dts文件,或者烧错设备树(dtb)文件了,
确认一定是要改 linux kernel目录下的 dts/dtsi 文件,而不是 u-boot 的 dts/dtsi 文件哦。
这里是加入的的arch/arm/boot/dts/sun8i-v3s.dtsi在这个文件中
然后下面是我是修改的这里是加入的的arch/arm/boot/dts/sun8i-v3s-licheepi-zero.dts中修改的中截图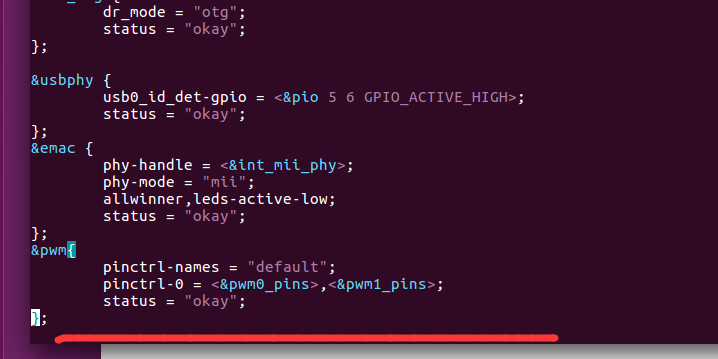
我这样配置也是按着文档上面配置的
离线
楼主 #32 2018-09-28 14:20:34 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
那会不会烧错设备树(dtb)文件了, 看下 static int sun4i_pwm_probe(struct platform_device *pdev) 这个函数有没有输出.
我烧写的dtb 是linux/arch/arm/boot/dts/sun8i-v3s-licheepi-zero.dtb这个文件
现在你说的这个函数sun4i_pwm_probe可以确定没有执行 所以里面就没有创建pwmchip0X
然后在终端打印出了这个 [ 0.060058] sun4i-pwm 1c21400.pwm: could not find pctldev for node /soc/pwm0, deferring probe
最近编辑记录 无情一刀 (2018-09-28 14:23:10)
离线
#33 2018-09-28 15:09:10 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
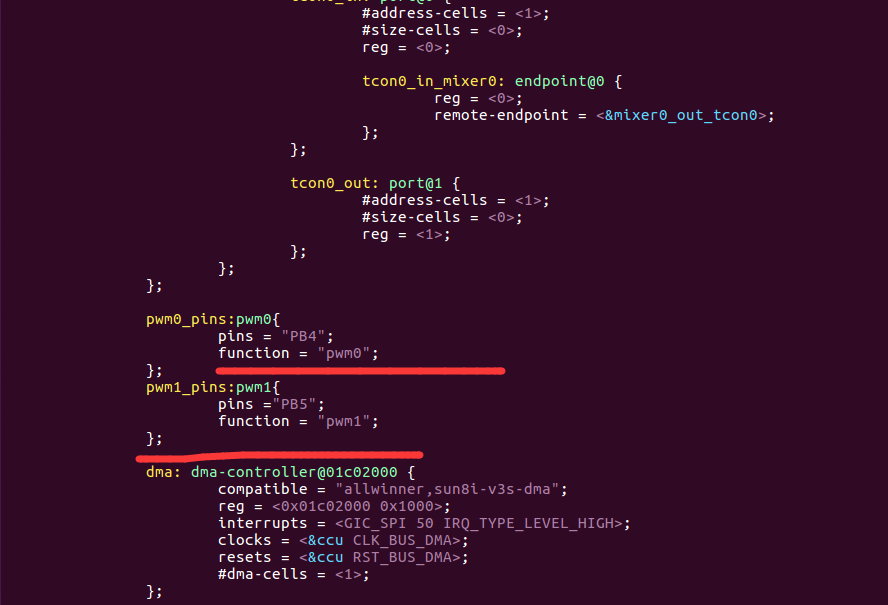
我跟踪了一下出错的地方, 找到源码 https://github.com/torvalds/linux/blob/master/drivers/pinctrl/devicetree.c
发现是 pinctrl 出问题了,
根据你的截图, 发现
pwm0_pins: pwm0 {
pins = "PB4";
function = "pwm0";
};
pwm1_pins: pwm1 {
pins = "PB5";
function = "pwm1";
};
放错地方了.
离线
楼主 #34 2018-09-28 15:21:28 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
我跟踪了一下出错的地方, 找到源码 https://github.com/torvalds/linux/blob/master/drivers/pinctrl/devicetree.c
发现是 pinctrl 出问题了,
根据你的截图, 发现
pwm0_pins: pwm0 {
pins = "PB4";
function = "pwm0";
};
pwm1_pins: pwm1 {
pins = "PB5";
function = "pwm1";
};放错地方了.
我刚才定位到Devicetree.c文件中的dt_to_map_one_config这个函数中
pwm0_pins: pwm0 {
pins = "PB4";
function = "pwm0";
};
pwm1_pins: pwm1 {
pins = "PB5";
function = "pwm1";
};我这些是放在sun8i-v3s.dtsi中的SOC括号中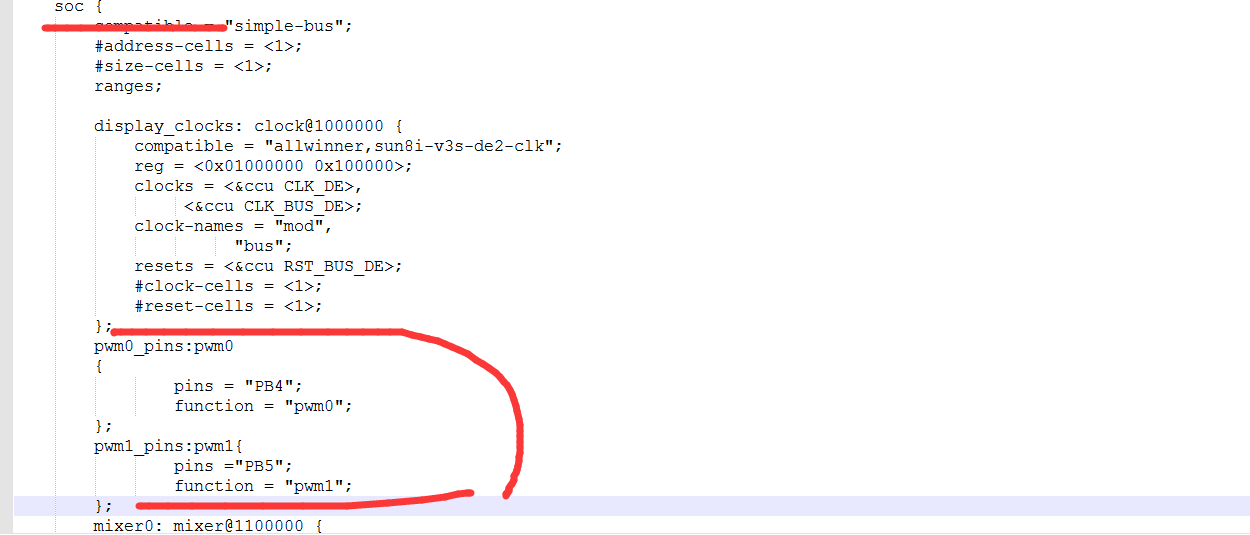
离线
楼主 #36 2018-09-28 15:47:30 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
这样做是不对的, 你参考一下其他外设的 pins 设置, 就知道应该放哪里了。
现在我已经将刚才的那两个配置IO口 放到pin:pinctrl@1c20400里面了 因为里面也有spi 和I2C也在里面
但是更新后出现[ 0.059417] sun4i-pwm: probe of 1c21400.pwm failed with error -12
出现问题的打印源码是
static int really_probe(struct device dev, struct device_driver drv)
{
int ret = -EPROBE_DEFER;
int local_trigger_count = atomic_read(&deferred_trigger_count);
bool test_remove = IS_ENABLED(CONFIG_DEBUG_TEST_DRIVER_REMOVE) &&
!drv->suppress_bind_attrs;
if (defer_all_probes) {
/*
Value of defer_all_probes can be set only by
device_defer_all_probes_enable() which, in turn, will call
wait_for_device_probe() right after that to avoid any races.
*/
dev_dbg(dev, "Driver %s force probe deferral\n", drv->name);
driver_deferred_probe_add(dev);
return ret;
}
ret = device_links_check_suppliers(dev);
if (ret)
return ret;
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
re_probe:
dev->driver = drv;
/ If using pinctrl, bind pins now before probing /
ret = pinctrl_bind_pins(dev);
if (ret)
goto pinctrl_bind_failed;
if (driver_sysfs_add(dev)) {
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
if (dev->pm_domain && dev->pm_domain->activate) {
ret = dev->pm_domain->activate(dev);
if (ret)
goto probe_failed;
}
最近编辑记录 无情一刀 (2018-09-28 15:52:51)
离线
楼主 #38 2018-09-28 15:53:53 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
去驱动跟踪一下,我也帮你看下 pwm-sun4i.c 源码.
现在我在看Dd.c下的这个函数really_probe
离线
#39 2018-09-28 15:57:05 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
https://github.com/torvalds/linux/blob/master/drivers/base/dd.c
default:
/ driver matched but the probe failed /
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
好像是这里面报出来的错误, 检查一下看什么原因。
离线
楼主 #41 2018-09-28 17:36:27 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
无情一刀 wrote:
晕哥 wrote:
去驱动跟踪一下,我也帮你看下 pwm-sun4i.c 源码.
现在我在看Dd.c下的这个函数really_probe
对, 就是这里, 检查一下.
看了好久都没有看出什么 打印的信息返回值一直为-12
离线
楼主 #42 2018-09-29 09:50:16 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 现在看了下 就是文档上面的配置 都配置过了 就是没有调用那个驱动 所以就没有创建那个pwm的pwmchip0X 不知道还要配置或是修改哪里了
离线
#43 2018-09-29 10:52:03 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
http://www-numi.fnal.gov/offline_software/srt_public_context/WebDocs/Errors/unix_system_errors.html
#define EPERM 1 / Operation not permitted /
#define ENOENT 2 / No such file or directory /
#define ESRCH 3 / No such process /
#define EINTR 4 / Interrupted system call /
#define EIO 5 / I/O error /
#define ENXIO 6 / No such device or address /
#define E2BIG 7 / Arg list too long /
#define ENOEXEC 8 / Exec format error /
#define EBADF 9 / Bad file number /
#define ECHILD 10 / No child processes /
#define EAGAIN 11 / Try again /
#define ENOMEM 12 / Out of memory /
#define EACCES 13 / Permission denied /
我查了一下 错误号 12 是 没内存错误???
年纪轻轻怎么会没内存?
离线
楼主 #46 2018-09-29 11:12:17 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
你的板子是自己做的吗?电源处理好了吗?CPU频率多少?DDR频率多少?
板子是买的
离线
#47 2018-09-29 11:28:59 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
Re: 设置PWM参数
https://github.com/torvalds/linux/blob/master/drivers/base/dd.c
我跟踪了一下代码, 是因为进入了 pinctrl_bind_failed 标号, 显示错误信息退出。
在这里进入了标号:
/ If using pinctrl, bind pins now before probing /
ret = pinctrl_bind_pins(dev);
if (ret)
goto pinctrl_bind_failed;
是不是你的PB4, PB5被别的功能使用了?
离线
楼主 #48 2018-09-29 11:30:33 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
把你的 dts/dtsi 传上来,用 code 标签包一下,我看下是不是设备树引起。
/*
* Copyright (C) 2016 Icenowy Zheng <icenowy@aosc.xyz>
*
* This file is dual-licensed: you can use it either under the terms
* of the GPL or the X11 license, at your option. Note that this dual
* licensing only applies to this file, and not this project as a
* whole.
*
* a) This file is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of the
* License, or (at your option) any later version.
*
* This file is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* Or, alternatively,
*
* b) Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Softwarwithout
* restriction, including without limitation the rights to use,
* copy, modify, merge, publish, distribute, sublicense, and/or
* sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following
* conditions:
*
* The above copyright notice and this permission notice shall be
* included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
* HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*/
#include <dt-bindings/interrupt-controller/arm-gic.h>
#include <dt-bindings/clock/sun8i-v3s-ccu.h>
#include <dt-bindings/reset/sun8i-v3s-ccu.h>
/ {
#address-cells = <1>;
#size-cells = <1>;
interrupt-parent = <&gic>;
chosen {
#address-cells = <1>;
#size-cells = <1>;
ranges;
simplefb_lcd: framebuffer@0 {
compatible = "allwinner,simple-framebuffer",
"simple-framebuffer";
allwinner,pipeline = "de0-lcd0";
clocks = <&ccu CLK_BUS_TCON0>, <&display_clocks 0>,
<&display_clocks 6>, <&ccu CLK_TCON0>;
status = "disabled";
};
};
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
clocks = <&ccu CLK_CPU>;
};
};
de: display-engine {
compatible = "allwinner,sun8i-v3s-display-engine";
allwinner,pipelines = <&mixer0>;
status = "disabled";
};
timer {
compatible = "arm,armv7-timer";
interrupts = <GIC_PPI 13 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_LOW)>,
<GIC_PPI 14 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_LOW)>,
<GIC_PPI 11 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_LOW)>,
<GIC_PPI 10 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_LOW)>;
};
clocks {
#address-cells = <1>;
#size-cells = <1>;
ranges;
osc24M: osc24M_clk {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "osc24M";
};
osc32k: osc32k_clk {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <32768>;
clock-output-names = "osc32k";
};
};
soc {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
ranges;
display_clocks: clock@1000000 {
compatible = "allwinner,sun8i-v3s-de2-clk";
reg = <0x01000000 0x100000>;
clocks = <&ccu CLK_DE>,
<&ccu CLK_BUS_DE>;
clock-names = "mod",
"bus";
resets = <&ccu RST_BUS_DE>;
#clock-cells = <1>;
#reset-cells = <1>;
};
mixer0: mixer@1100000 {
compatible = "allwinner,sun8i-v3s-de2-mixer";
reg = <0x01100000 0x100000>;
clocks = <&display_clocks 0>,
<&display_clocks 6>;
clock-names = "bus",
"mod";
resets = <&display_clocks 0>;
assigned-clocks = <&display_clocks 6>;
assigned-clock-rates = <150000000>;
ports {
#address-cells = <1>;
#size-cells = <0>;
mixer0_out: port@1 {
#address-cells = <1>;
#size-cells = <0>;
reg = <1>;
mixer0_out_tcon0: endpoint@0 {
reg = <0>;
remote-endpoint = <&tcon0_in_mixer0>;
};
};
};
};
mmc1: mmc@01c10000 {
compatible = "allwinner,sun7i-a20-mmc";
reg = <0x01c10000 0x1000>;
clocks = <&ccu CLK_BUS_MMC1>,
<&ccu CLK_MMC1>,
<&ccu CLK_MMC1_OUTPUT>,
<&ccu CLK_MMC1_SAMPLE>;
clock-names = "ahb",
"mmc",
"output",
"sample";
resets = <&ccu RST_BUS_MMC1>;
reset-names = "ahb";
interrupts = <GIC_SPI 61 IRQ_TYPE_LEVEL_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mmc1_pins>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
mmc2: mmc@01c11000 {
compatible = "allwinner,sun7i-a20-mmc";
reg = <0x01c11000 0x1000>;
clocks = <&ccu CLK_BUS_MMC2>,
<&ccu CLK_MMC2>,
<&ccu CLK_MMC2_OUTPUT>,
<&ccu CLK_MMC2_SAMPLE>;
clock-names = "ahb",
"mmc",
"output",
"sample";
resets = <&ccu RST_BUS_MMC2>;
reset-names = "ahb";
interrupts = <GIC_SPI 62 IRQ_TYPE_LEVEL_HIGH>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
usb_otg: usb@01c19000 {
compatible = "allwinner,sun8i-h3-musb";
reg = <0x01c19000 0x0400>;
clocks = <&ccu CLK_BUS_OTG>;
resets = <&ccu RST_BUS_OTG>;
interrupts = <GIC_SPI 71 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "mc";
phys = <&usbphy 0>;
phy-names = "usb";
extcon = <&usbphy 0>;
status = "disabled";
};
usbphy: phy@01c19400 {
compatible = "allwinner,sun8i-v3s-usb-phy";
reg = <0x01c19400 0x2c>,
<0x01c1a800 0x4>;
reg-names = "phy_ctrl",
"pmu0";
clocks = <&ccu CLK_USB_PHY0>;
clock-names = "usb0_phy";
resets = <&ccu RST_USB_PHY0>;
reset-names = "usb0_reset";
status = "disabled";
#phy-cells = <1>;
};
ehci0: usb@01c1a000 {
compatible = "allwinner,sun8i-v3s-ehci", "generic-ehci";
reg = <0x01c1a000 0x100>;
interrupts = <GIC_SPI 72 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_EHCI0>, <&ccu CLK_BUS_OHCI0>;
resets = <&ccu RST_BUS_EHCI0>, <&ccu RST_BUS_OHCI0>;
status = "disabled";
};
ohci0: usb@01c1a400 {
compatible = "allwinner,sun8i-v3s-ohci", "generic-ohci";
reg = <0x01c1a400 0x100>;
interrupts = <GIC_SPI 73 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_EHCI0>, <&ccu CLK_BUS_OHCI0>,
<&ccu CLK_USB_OHCI0>;
resets = <&ccu RST_BUS_EHCI0>, <&ccu RST_BUS_OHCI0>;
status = "disabled";
};
ccu: clock@01c20000 {
compatible = "allwinner,sun8i-v3s-ccu";
reg = <0x01c20000 0x400>;
clocks = <&osc24M>, <&osc32k>;
clock-names = "hosc", "losc";
#clock-cells = <1>;
#reset-cells = <1>;
};
rtc: rtc@01c20400 {
compatible = "allwinner,sun6i-a31-rtc";
reg = <0x01c20400 0x54>;
interrupts = <GIC_SPI 40 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 41 IRQ_TYPE_LEVEL_HIGH>;
};
pio: pinctrl@01c20800 {
compatible = "allwinner,sun8i-v3s-pinctrl";
reg = <0x01c20800 0x400>;
interrupts = <GIC_SPI 15 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 17 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_PIO>, <&osc24M>, <&osc32k>;
clock-names = "apb", "hosc", "losc";
gpio-controller;
#gpio-cells = <3>;
interrupt-controller;
#interrupt-cells = <3>;
i2c0_pins: i2c0 {
pins = "PB6", "PB7";
function = "i2c0";
};
uart0_pins_a: uart0@0 {
pins = "PB8", "PB9";
function = "uart0";
};
lcd_rgb666_pins_a: lcd-rgb666-pe {
pins = "PE0", "PE1", "PE2", "PE3", "PE4", "PE5",
"PE6", "PE7", "PE8", "PE9", "PE10", "PE11",
"PE12", "PE13", "PE14", "PE15", "PE16", "PE17",
"PE18", "PE19", "PE23", "PE24";
function = "lcd0";
};
mmc0_pins_a: mmc0@0 {
pins = "PF0", "PF1", "PF2", "PF3",
"PF4", "PF5";
function = "mmc0";
drive-strength = <30>;
bias-pull-up;
};
mmc1_pins: mmc1 {
pins = "PG0", "PG1", "PG2", "PG3",
"PG4", "PG5";
function = "mmc1";
drive-strength = <30>;
bias-pull-up;
};
spi0_pins: spi0 {
pins = "PC0", "PC1", "PC2", "PC3";
function = "spi0";
};
pwm0_pins:pwm0{
pins = "PB4";
function = "pwm0";
};
pwm1_pins:pwm1{
pins ="PB5";
function = "pwm1";
};
};
timer@01c20c00 {
compatible = "allwinner,sun4i-a10-timer";
reg = <0x01c20c00 0xa0>;
interrupts = <GIC_SPI 18 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 19 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&osc24M>;
};
wdt0: watchdog@01c20ca0 {
compatible = "allwinner,sun6i-a31-wdt";
reg = <0x01c20ca0 0x20>;
interrupts = <GIC_SPI 25 IRQ_TYPE_LEVEL_HIGH>;
};
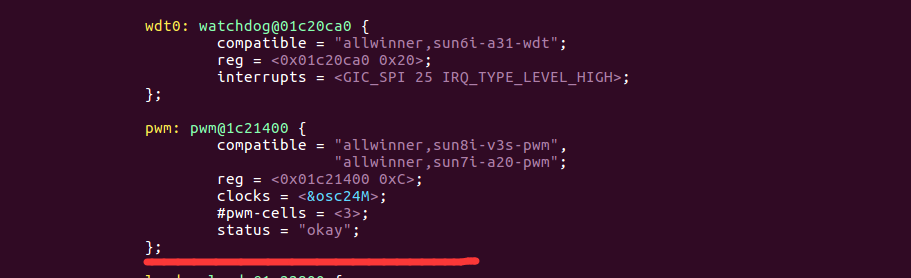
pwm: pwm@1c21400 {
compatible = "allwinner,sun7i-a20-pwm";
reg = <0x01c21400 0xC>;
clocks = <&osc24M>;
#pwm-cells = <3>;
status = "okay";
};
lradc: lradc@1c22800 {
compatible = "allwinner,sun4i-a10-lradc-keys";
reg = <0x01c22800 0x400>;
interrupts = <GIC_SPI 30 IRQ_TYPE_LEVEL_HIGH>;
status = "disabled";
};
codec: codec@01c22c00 {
#sound-dai-cells = <0>;
compatible = "allwinner,sun8i-v3s-codec";
reg = <0x01c22c00 0x400>;
interrupts = <GIC_SPI 29 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_CODEC>, <&ccu CLK_AC_DIG>;
clock-names = "apb", "codec";
resets = <&ccu RST_BUS_CODEC>;
dmas = <&dma 15>, <&dma 15>;
dma-names = "rx", "tx";
allwinner,codec-analog-controls = <&codec_analog>;
status = "disabled";
};
codec_analog: codec-analog@01c23000 {
compatible = "allwinner,sun8i-v3s-codec-analog";
reg = <0x01c23000 0x4>;
};
uart0: serial@01c28000 {
compatible = "snps,dw-apb-uart";
reg = <0x01c28000 0x400>;
interrupts = <GIC_SPI 0 IRQ_TYPE_LEVEL_HIGH>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART0>;
resets = <&ccu RST_BUS_UART0>;
status = "disabled";
}
uart1: serial@01c28400 {
compatible = "snps,dw-apb-uart";
reg = <0x01c28400 0x400>;
interrupts = <GIC_SPI 1 IRQ_TYPE_LEVEL_HIGH>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART1>;
resets = <&ccu RST_BUS_UART1>;
status = "disabled";
};
uart2: serial@01c28800 {
compatible = "snps,dw-apb-uart";
reg = <0x01c28800 0x400>;
interrupts = <GIC_SPI 2 IRQ_TYPE_LEVEL_HIGH>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART2>;
resets = <&ccu RST_BUS_UART2>;
status = "disabled";
};
i2c0: i2c@01c2ac00 {
compatible = "allwinner,sun6i-a31-i2c";
reg = <0x01c2ac00 0x400>;
interrupts = <GIC_SPI 6 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_I2C0>;
resets = <&ccu RST_BUS_I2C0>;
pinctrl-names = "default";
pinctrl-0 = <&i2c0_pins>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
i2c1: i2c@01c2b000 {
compatible = "allwinner,sun6i-a31-i2c";
reg = <0x01c2b000 0x400>;
interrupts = <GIC_SPI 7 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_I2C1>;
resets = <&ccu RST_BUS_I2C1>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
emac: ethernet@1c30000 {
compatible = "allwinner,sun8i-v3s-emac";
syscon = <&syscon>;
reg = <0x01c30000 0x104>;
interrupts = <GIC_SPI 82 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "macirq";
resets = <&ccu RST_BUS_EMAC>;
reset-names = "stmmaceth";
clocks = <&ccu CLK_BUS_EMAC>;
clock-names = "stmmaceth";
phy-handle = <&int_mii_phy>;
phy-mode = "mii";
#address-cells = <1>;
#size-cells = <0>;
status = "disabled";
mdio {
#address-cells = <1>;
#size-cells = <0>;
int_mii_phy: ethernet-phy@1 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <1>;
clocks = <&ccu CLK_BUS_EPHY>;
resets = <&ccu RST_BUS_EPHY>;
#phy-is-integrated;
};
};
};
spi0: spi@1c68000 {
compatible = "allwinner,sun8i-h3-spi";
reg = <0x01c68000 0x1000>;
interrupts = <GIC_SPI 65 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_BUS_SPI0>, <&ccu CLK_SPI0>;
clock-names = "ahb", "mod";
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins>;
resets = <&ccu RST_BUS_SPI0>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
gic: interrupt-controller@01c81000 {
compatible = "arm,cortex-a7-gic", "arm,cortex-a15-gic";
reg = <0x01c81000 0x1000>,
<0x01c82000 0x1000>,
<0x01c84000 0x2000>,
<0x01c86000 0x2000>;
interrupt-controller;
#interrupt-cells = <3>;
interrupts = <GIC_PPI 9 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_HIGH)>;
};
};
};离线
楼主 #49 2018-09-29 11:41:12 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
晕哥 wrote:
https://github.com/torvalds/linux/blob/master/drivers/base/dd.c
我跟踪了一下代码, 是因为进入了 pinctrl_bind_failed 标号, 显示错误信息退出。
在这里进入了标号:
/ If using pinctrl, bind pins now before probing /
ret = pinctrl_bind_pins(dev);
if (ret)
goto pinctrl_bind_failed;是不是你的PB4, PB5被别的功能使用了?
没有使用这两个管脚
离线
楼主 #50 2018-09-29 11:51:50 分享评论
- 无情一刀
- 会员
- 注册时间: 2018-09-04
- 已发帖子: 723
- 积分: 690
Re: 设置PWM参数
/ If using pinctrl, bind pins now before probing /
ret = pinctrl_bind_pins(dev);
if (ret)
goto pinctrl_bind_failed;
但是我在前面打印 这个ret为0 不是从这里进去的
离线
#51 2018-09-29 11:56:29 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,483
- 积分: 9207
离线
#52 2020-01-13 10:35:18 分享评论
- yuanlwjt
- 会员
- 注册时间: 2019-10-23
- 已发帖子: 129
- 积分: 109
Re: 设置PWM参数
遇到同样问题,不知道该问题解决没有?
离线
#53 2020-01-13 10:39:14 分享评论
- yuanlwjt
- 会员
- 注册时间: 2019-10-23
- 已发帖子: 129
- 积分: 109
Re: 设置PWM参数
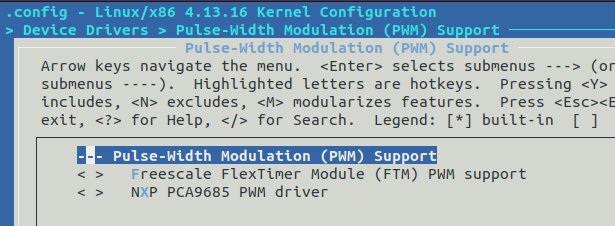
没有全志PWM选项
离线
东莞哇酷科技有限公司开发