楼主 #1 2020-03-08 23:01:16 分享评论
- 打老虎
- 会员
- 注册时间: 2019-04-03
- 已发帖子: 16
- 积分: 36
研究了下Tslib内关于触摸屏校准的算法,水一贴
最近搞个触摸屏校准,参考了Tslib,感觉这个算法挺巧妙,为了不让自己半天计算白费,
借晕哥宝地怒水一贴,数学算法可能大伙不感兴趣,就当随笔了,本人数学渣,
若有不当处高手请轻拍。
一般触摸屏校准无非以下几种情况:
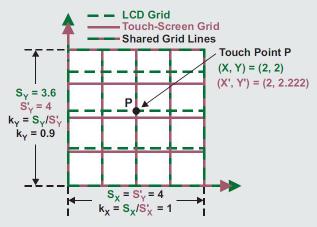
图1 比例
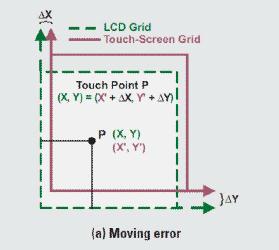
图2 移动
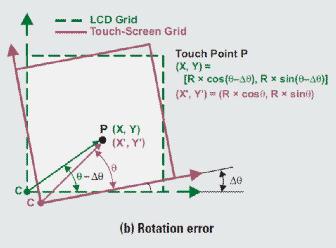
图3 旋转
根据触摸的AD值和LCD分辨率不同,两者会有比例关系。触摸屏安装的时候可能会和LCD不太契合,
比如贴歪了,可能会有移动和旋转的误差,使得两者坐标有偏差。
正因为有这些误差,才需要校正。假设屏上有个P点,在LCD的坐标是(X, Y),在触摸屏上是(X', Y')。
在二维坐标下上面三种情况分别可以用如下三个矩阵表示(不是我编的):
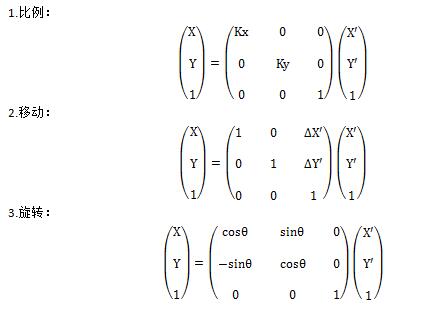
咱也不用考虑当前哪种情况了,假设三个误差都存在(某项不存在的话,后面带入计算自然会去除掉),就全部乘一下:
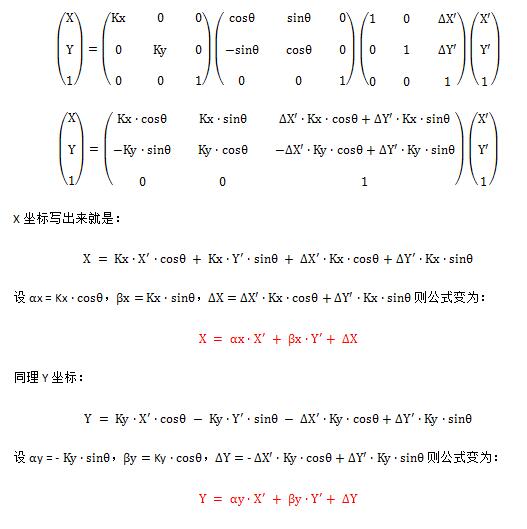
其中 X,Y是LCD坐标由自己设定,X′和Y′触摸屏的坐标,由测量得知。
而我们目的就是求αx,βx,ΔX和αy,βy,ΔY这6个未知数而已,那只要构建6个方程,
只需要取屏幕上3个点即可。
注意:重点来了不要被上面的推导过程吓到,又是三角函数又是矩阵相乘,
其实没人会关心触摸屏和LCD到底贴歪了多少度,移动了多少个像素点,
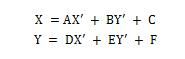
只要知道我们的目的是为了求这些系数,这些值能帮助我们将触摸屏坐标转化为LCD坐标就可以了,
更简化且平易近人的写法如下:
解方程的话,可以用克拉默法则,自己玩的话随便取3个点手算也行,注意3点法需要取独立点,
即在屏幕上画出三个已知LCD坐标的点,最好不要连成一条线,然后记录下这些点的触摸屏坐标,
代入方程可得:
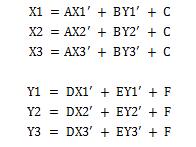
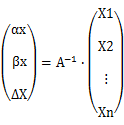
这样可以求出A,B,C,D,E和F,若按矩阵写法(还是换回α和β的写法)如下: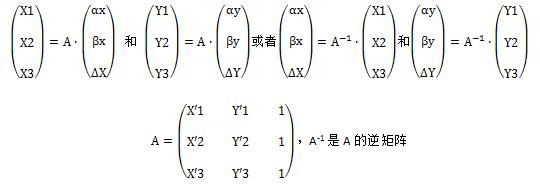
写成方程就是 b= A∙x,或x = A-1 ∙ b,其中A是系数矩阵,b是常数列向量,x是未知数列向量。
对应上面x坐标的公式b就是: ,
,
未知数列向量就是: 。
。
注:要求的线性方程x = A-1 ∙ b中,A-1=A*/|A|,设Δ = |A|也就是系数矩阵A的行列式值,
伴随矩阵A*与b相乘之后得到Aj,那么未知数解xj = |Aj|/|A|。
本方程3个未知数的|A1|,|A2|和|A3|标记为为Δx1、Δx2和Δx3,
那么3个未知数解分别是αx = Δx1/Δ,βx = Δx2/Δ,ΔX = Δx3/Δ。这是克拉默法则。
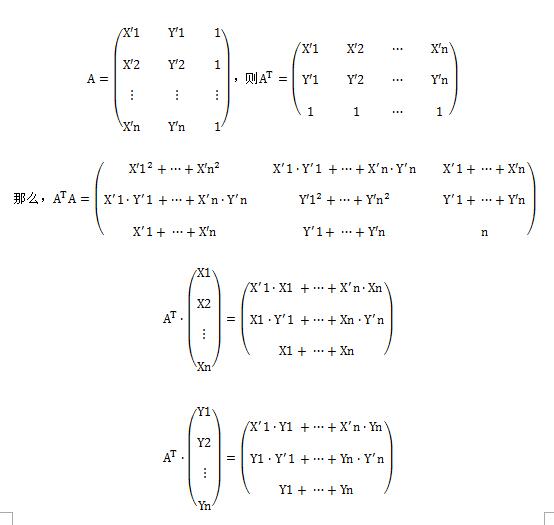
以上铺垫完毕,通通不用记住,下面说说Tslib里面的5点法,或者叫n点法,改写上面的矩阵如下: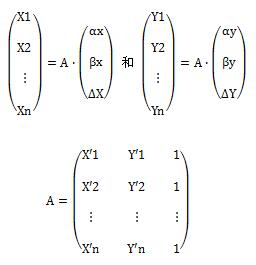
按照之前3点法的解法我们也用克拉默法则,但是忽然发现A居然不是方阵!!
A是nx3(n>3)的矩阵!A-1都没有意义了!x = A-1 ∙ b都没了!
和
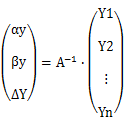
还有啥用!!
等等,有点大惊小怪了,不是方阵的话A-1就是个伪逆矩阵吧!n>3左逆矩阵为 A-1 = (ATA)-1 AT,
那么公式变为:

为啥要这么变?别和我说什么最小二乘解左逆右逆什么最优解之类的,我就是想要搞个方阵,
A的转置AT 和A相乘就变成方阵,令A = ATA,b = 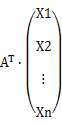 ,
,
这样x = A-1 ∙ b又来了!接下来只要求出ATA和就可以用克拉默法则了。
为了计算方便我们定义如下: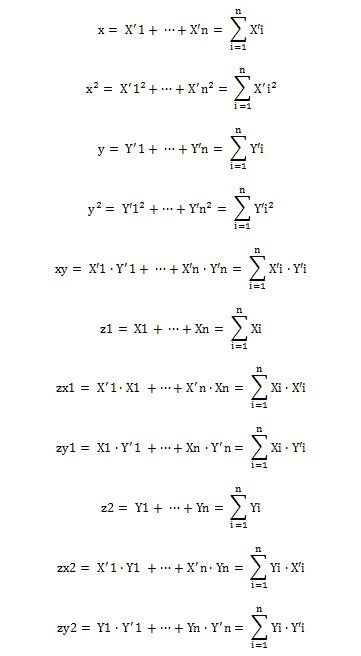
那么可以放心求解: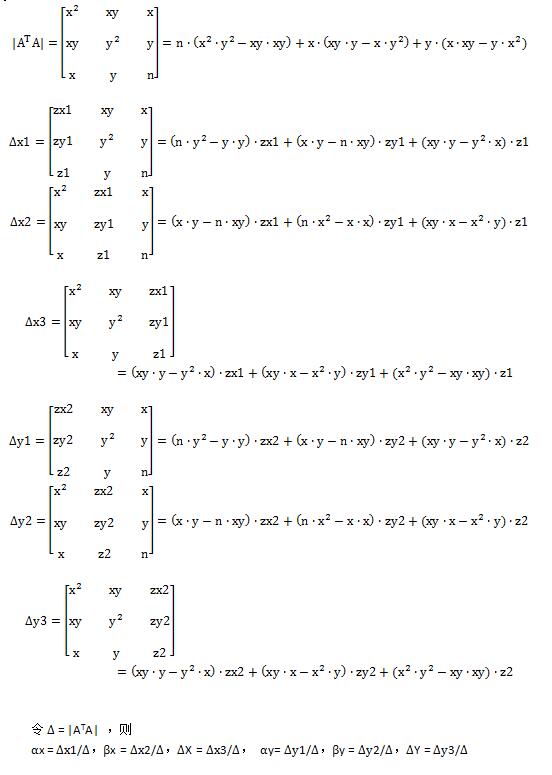
令Δ = |ATA| ,则
αx = Δx1/Δ,βx = Δx2/Δ,ΔX = Δx3/Δ, αy= Δy1/Δ,βy = Δy2/Δ,ΔY = Δy3/Δ
重点来了,以上公式统统不用纠结,带入上面公式可以发现一个规律: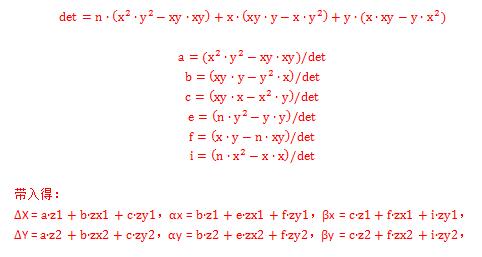
此时会发现这些红色的系数公式和Tslib内的perform_calibration函数内的一模一样。完结撒花。
附:
/*
* tslib/tests/ts_calibrate_common.c
*
* Copyright (C) 2001 Russell King.
*
* This file is placed under the GPL. Please see the file
* COPYING for more details.
*
* SPDX-License-Identifier: GPL-2.0+
*
*
* common functions for calibration
*/
#include <stdio.h>
#include "ts_calibrate.h"
int perform_calibration(calibration *cal)
{
int j;
float n, x, y, x2, y2, xy, z, zx, zy;
float det, a, b, c, e, f, i;
float scaling = 65536.0;
/* Get sums for matrix */
n = x = y = x2 = y2 = xy = 0;
for (j = 0; j < 5; j++) {
n += 1.0;
x += (float)cal->x[j];
y += (float)cal->y[j];
x2 += (float)(cal->x[j]*cal->x[j]);
y2 += (float)(cal->y[j]*cal->y[j]);
xy += (float)(cal->x[j]*cal->y[j]);
}
/* Get determinant of matrix -- check if determinant is too small */
det = n*(x2*y2 - xy*xy) + x*(xy*y - x*y2) + y*(x*xy - y*x2);
if (det < 0.1 && det > -0.1) {
printf("ts_calibrate: determinant is too small -- %f\n", det);
return 0;
}
/* Get elements of inverse matrix */
a = (x2*y2 - xy*xy)/det;
b = (xy*y - x*y2)/det;
c = (x*xy - y*x2)/det;
e = (n*y2 - y*y)/det;
f = (x*y - n*xy)/det;
i = (n*x2 - x*x)/det;
/* Get sums for x calibration */
z = zx = zy = 0;
for (j = 0; j < 5; j++) {
z += (float)cal->xfb[j];
zx += (float)(cal->xfb[j]*cal->x[j]);
zy += (float)(cal->xfb[j]*cal->y[j]);
}
/* Now multiply out to get the calibration for framebuffer x coord */
cal->a[0] = (int)((a*z + b*zx + c*zy)*(scaling));
cal->a[1] = (int)((b*z + e*zx + f*zy)*(scaling));
cal->a[2] = (int)((c*z + f*zx + i*zy)*(scaling));
printf("%f %f %f\n", (a*z + b*zx + c*zy),
(b*z + e*zx + f*zy),
(c*z + f*zx + i*zy));
/* Get sums for y calibration */
z = zx = zy = 0;
for (j = 0; j < 5; j++) {
z += (float)cal->yfb[j];
zx += (float)(cal->yfb[j]*cal->x[j]);
zy += (float)(cal->yfb[j]*cal->y[j]);
}
/* Now multiply out to get the calibration for framebuffer y coord */
cal->a[3] = (int)((a*z + b*zx + c*zy)*(scaling));
cal->a[4] = (int)((b*z + e*zx + f*zy)*(scaling));
cal->a[5] = (int)((c*z + f*zx + i*zy)*(scaling));
printf("%f %f %f\n", (a*z + b*zx + c*zy),
(b*z + e*zx + f*zy),
(c*z + f*zx + i*zy));
/* If we got here, we're OK, so assign scaling to a[6] and return */
cal->a[6] = (int)scaling;
return 1;
}参考资料:
Calibration in touch-screen systems.pdf
最近编辑记录 打老虎 (2020-03-08 23:03:40)
离线
#2 2020-03-08 23:14:16 分享评论
- sea18c
- 会员
- 注册时间: 2019-08-05
- 已发帖子: 230
- 积分: 222.5
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
太深奥了,看不懂,前排帮顶
离线
楼主 #3 2020-03-09 08:46:19 分享评论
- 打老虎
- 会员
- 注册时间: 2019-04-03
- 已发帖子: 16
- 积分: 36
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
太深奥了,看不懂,前排帮顶
haha,多谢多谢
只是研究了下Tslib里校准算法的原理,看了TI一篇文档,用数学推导了下,发现两者结果是一样(就是结尾红字部分)。
离线
#4 2020-03-09 08:56:59 分享评论
- Jmhh247
- 会员
- 注册时间: 2018-12-21
- 已发帖子: 262
- 积分: 262
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
感谢楼主分享,所有字我都认识
离线
楼主 #5 2020-03-09 12:40:28 分享评论
- 打老虎
- 会员
- 注册时间: 2019-04-03
- 已发帖子: 16
- 积分: 36
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
感谢楼主分享,所有字我都认识
![]()
离线
#6 2020-03-10 08:35:21 分享评论
- OggyJFX
- 会员
- 注册时间: 2019-05-21
- 已发帖子: 110
- 积分: 109.5
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
我晕,顶顶顶顶顶。
楼主威武。
离线
#7 2020-03-10 09:05:21 分享评论
- sea18c
- 会员
- 注册时间: 2019-08-05
- 已发帖子: 230
- 积分: 222.5
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
楼主是研究型人材 ![]()
离线
#8 2020-03-10 09:35:05 分享评论
- qter
- 会员
- 注册时间: 2017-09-14
- 已发帖子: 40
- 积分: 40
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
优秀!楼主可以再讲讲 tslib 里面的各种滤波器么?在线等.
离线
楼主 #9 2020-03-11 16:54:28 分享评论
- 打老虎
- 会员
- 注册时间: 2019-04-03
- 已发帖子: 16
- 积分: 36
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
优秀!楼主可以再讲讲 tslib 里面的各种滤波器么?在线等.
粗略看了下好像中值滤波,iir,消抖,感觉是常规操作啊:D
离线
#10 2022-07-22 16:45:27 分享评论
- Events
- 会员
- 注册时间: 2022-07-22
- 已发帖子: 7
- 积分: 17
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
屏幕点定位方法我就知道个五点定位法,楼主的公式太深奥了得仔细看
离线
#11 2022-07-25 14:19:38 分享评论
- 笔走天下
- 会员

- 注册时间: 2021-08-13
- 已发帖子: 126
- 积分: 0.5
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
@打老虎
晕了,这个是五点触摸检测法吗
离线
楼主 #12 2023-10-31 09:32:05 分享评论
- 打老虎
- 会员
- 注册时间: 2019-04-03
- 已发帖子: 16
- 积分: 36
Re: 研究了下Tslib内关于触摸屏校准的算法,水一贴
@打老虎
晕了,这个是五点触摸检测法吗
:lol其实就是最小二乘法求系数,哈哈哈
离线
太原小智科技有限责任公司 - 东莞哇酷科技有限公司联合开发