楼主 #1 2018-02-08 08:51:05 分享评论
- 晕哥
- 管理员

- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
X1000 phoenix 添加 旋转编码器驱动程序
X1000/platform/kernel/arch/mips/xburst/soc-x1000/chip-x1000/phoenix/common/board_base.c
添加平台驱动与平台设备代码:
#include <linux/input.h>
#include <linux/rotary_encoder.h>
//#define GPIO_ROTARY_A 1
//#define GPIO_ROTARY_B 2
static struct rotary_encoder_platform_data my_rotary_encoder_info = {
.steps = 24,
.axis = ABS_X,
.relative_axis = false,
.rollover = false,
.gpio_a = GPIO_PC(5), //GPIO_ROTARY_A, 填入实际引脚A
.gpio_b = GPIO_PC(4), //GPIO_ROTARY_B, 填入实际引脚B
.inverted_a = 0,
.inverted_b = 0,
.half_period = false,
//.wakeup_source = false,
};
static struct platform_device rotary_encoder_device = {
.name = "rotary-encoder",
.id = 0,
.dev = {
.platform_data = &my_rotary_encoder_info,
}
};添加设备:
DEF_DEVICE(&rotary_encoder_device, 0, 0),
make menuconfig
勾选旋转编码器驱动:
Device Drivers ---> Input device support ---> Miscellaneous devices
---> <*> Rotary encoders connected to GPIO pins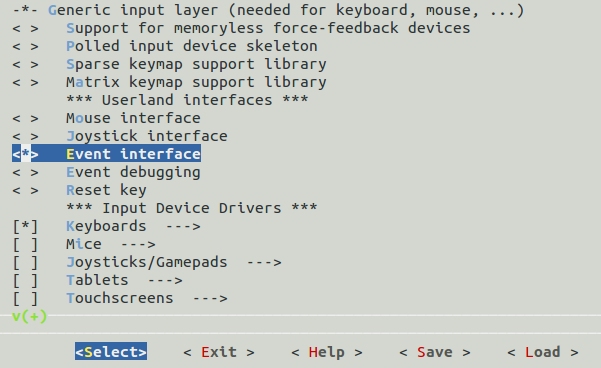
选中用户接口, 使驱动产生 /dev/input/eventX 设备
Device Drivers ---> Input device support ---> <*> Event interface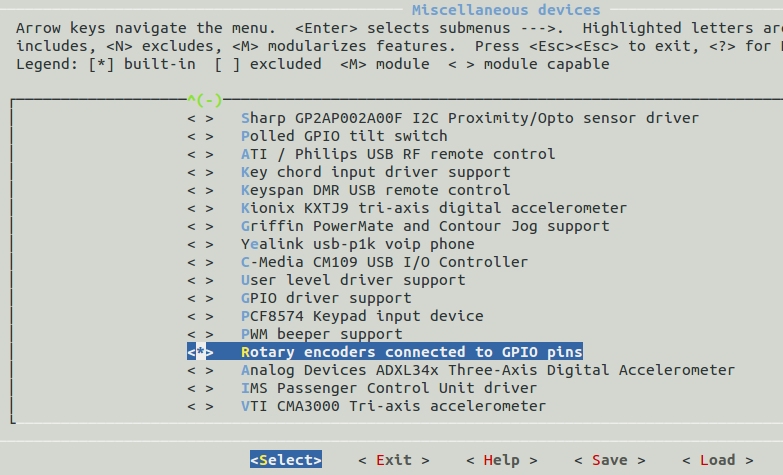
下载编译 http://elinux.org/images/9/93/Evtest.c
执行 evtest /dev/input/eventX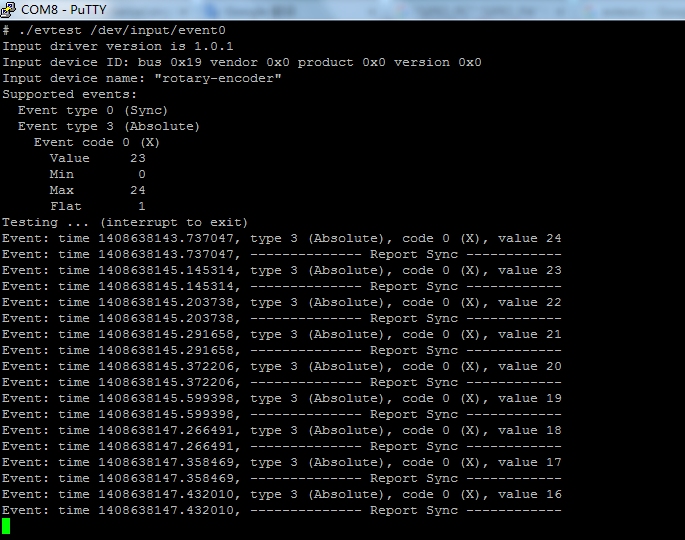
离线
#2 2019-03-16 09:27:13 分享评论
- 超级萌新
- 会员
- 注册时间: 2018-05-04
- 已发帖子: 408
- 积分: 407
Re: X1000 phoenix 添加 旋转编码器驱动程序
这个顶起,我打算在V3s也加上旋转编码器。
是不是两个脚都要接中断脚上?
离线
#3 2019-03-16 09:32:42 分享评论
- 微凉VeiLiang
- 会员

- 所在地: 深圳
- 注册时间: 2018-10-28
- 已发帖子: 649
- 积分: 539
- 个人网站
Re: X1000 phoenix 添加 旋转编码器驱动程序
旋转编码器,正交解码,让我想起了飞思卡尔智能车
离线
#4 2019-03-16 10:23:37 分享评论
- 超级萌新
- 会员
- 注册时间: 2018-05-04
- 已发帖子: 408
- 积分: 407
Re: X1000 phoenix 添加 旋转编码器驱动程序
微凉VeiLiang wrote:
旋转编码器,正交解码,让我想起了飞思卡尔智能车
一看就是参加过竞赛的
离线
#5 2019-03-16 10:24:17 分享评论
- jimmy
- 会员
- 注册时间: 2017-10-29
- 已发帖子: 316
- 积分: 315
Re: X1000 phoenix 添加 旋转编码器驱动程序
Linux里面驱动真全,这个都有
离线
感谢为中文互联网持续输出优质内容的各位老铁们。
QQ: 516333132, 微信(wechat): whycan_cn (哇酷网/挖坑网/填坑网) service@whycan.cn
东莞哇酷科技有限公司开发
东莞哇酷科技有限公司开发