楼主 # 2022-08-19 15:06:19 分享评论
- sczhf
- 会员
- 注册时间: 2020-11-30
- 已发帖子: 18
- 积分: 168
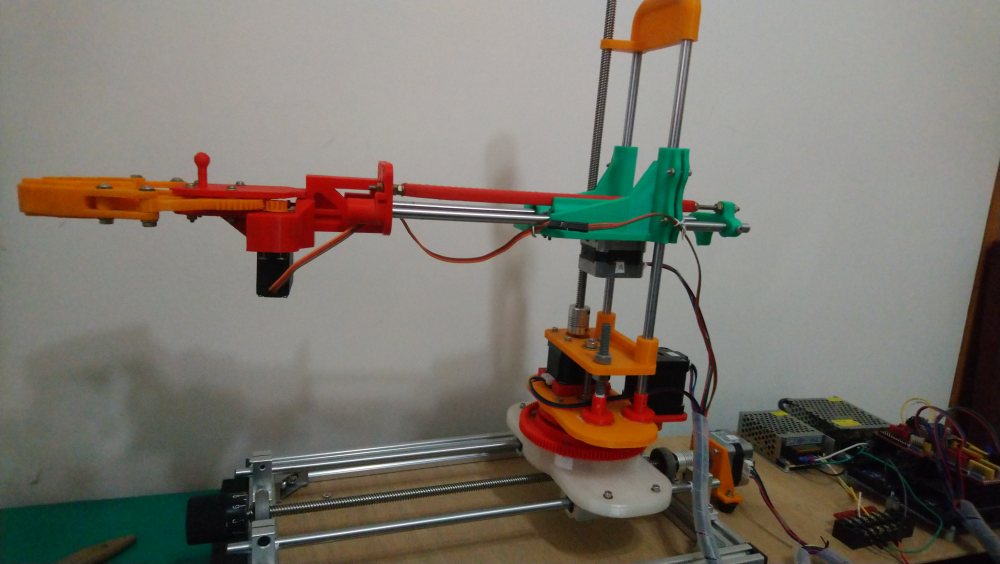
分享Arduino驱动的机械臂,附带3D打印模型,软件控制方案
控制重点
使用 Modbus TCP 通讯协议,利用网络发送指令给 Arduino mega2560 开发板
使用开源的 Modbus TCP 程序库,串接 Arduino mega2560、CNC Shield V3、A4988,并以此控制 42 步进马达。
连接电脑上的摄象头,直接拍摄平移式机械臂,即时运动影象。
运行展示
点击下方视频链接查看运行的效果:
https://www.ixigua.com/iframe/7133447547426701831
使用控制设备
序号 零件名称 数量
1 Arduino Mega 2560 开发板 2
2 42 步进电机 4
3 270° 舵机 1
4 CNC Shield V3 2
5 A4988 步进电机驱动器 4
6 W5100 EtherNet 网络扩展板 2
7 网络摄像头(罗技C270i) 1
使用工业通讯协定
Modbus TCP,可换用 Modbus RTU、OPC UA、MQTT、RestAPI、WebSocket。
使用开发软体
Smart物联网的精灵。软件控制的设计方案是出自于此。
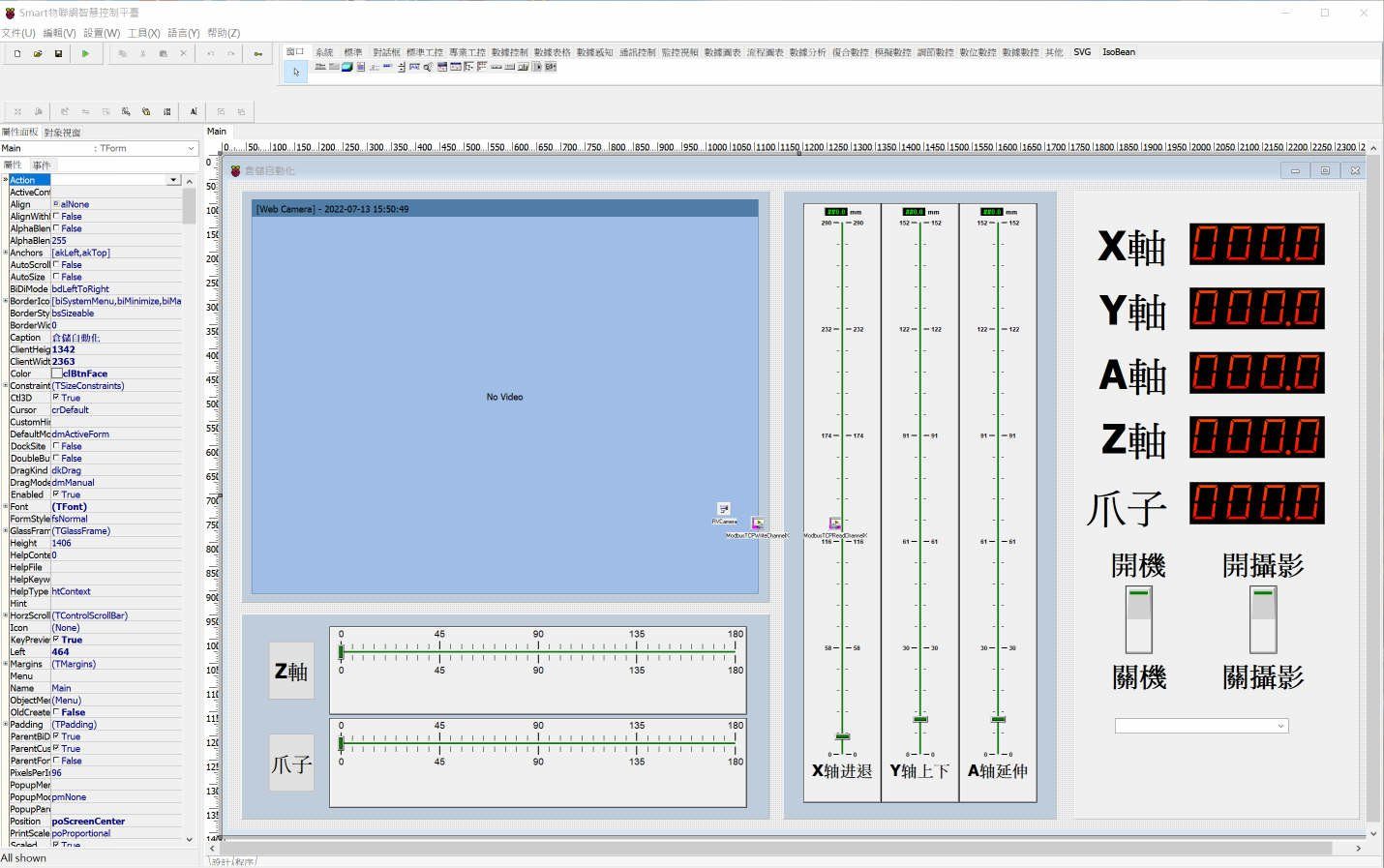
零件连线
基本的零件连线示意图如下。由于一块CNC Shield 最多支持三块A4988的独立驱动,故此处使用两块板来实现相应的功能。舵机用于控制爪子的开合,其余的步进马达分别控制四轴方向上的运动。

外壳打印
使用3D打印制作外壳的材料。所需的素材文件会在下方的链接中提供。外壳打印完成后进行组装。

参考资料
上述提到所需的相关文件已放在Gitee:
https://gitee.com/isoface-iot/Smart/tree/master/demo/iot/s-eq-dem-2201_translation_robotic_arm。
其中有包含一个后缀名为 sdb 的文件,这个文件是软件控制方案的工程文件。需使用专门的开发工具打开。可在Gitee 项目中获取下载链接:
https://gitee.com/isoface-iot/Smart
最近编辑记录 sczhf (2022-08-19 15:07:31)
离线
楼主 #2 2022-08-26 10:00:07 分享评论
- sczhf
- 会员
- 注册时间: 2020-11-30
- 已发帖子: 18
- 积分: 168
Re: 分享Arduino驱动的机械臂,附带3D打印模型,软件控制方案
gmyu wrote:
威武,打印的东西只能这么慢么?
这个只是演示的效果,如果要调整速度的话,可以自己调整Arduino代码里步进电机的转速
离线
楼主 #3 2022-08-27 13:55:48 分享评论
- sczhf
- 会员
- 注册时间: 2020-11-30
- 已发帖子: 18
- 积分: 168
Re: 分享Arduino驱动的机械臂,附带3D打印模型,软件控制方案
主文章中的地址多了个句号,访问的时候把句号去掉,或者点这个链接也可以 https://gitee.com/isoface-iot/Smart/tree/master/demo/iot/s-eq-dem-2201_translation_robotic_arm
离线
东莞哇酷科技有限公司开发