楼主 #1 2018-07-25 09:32:24 分享评论

楼主 #2 2018-07-25 09:46:09 分享评论
- 晕哥
- 管理员

- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
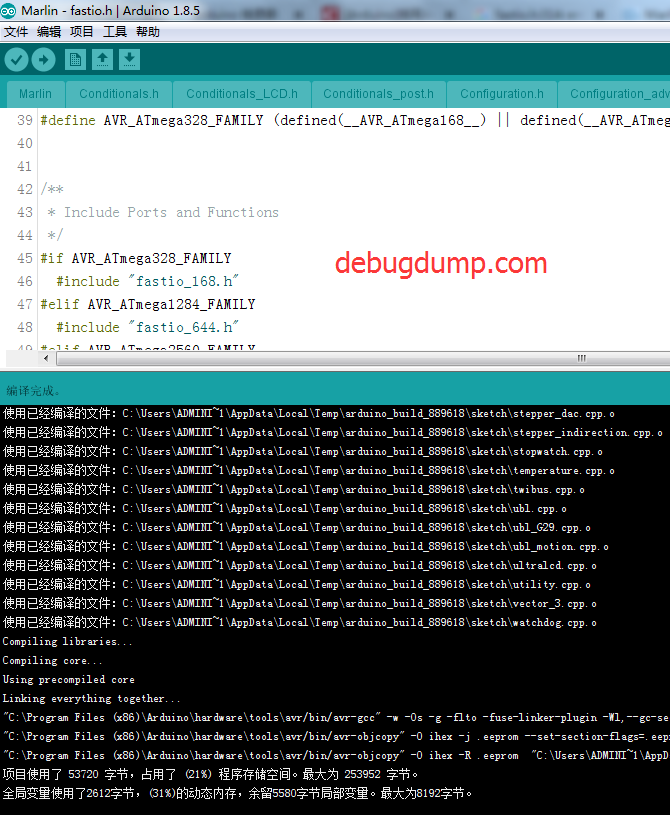
基于arduino 的 marlin 固件编译成功.
arduino-1.8.5-windows.exe 下载地址: https://www.arduino.cc/en/Main/Software
marlin 固件下载地址: https://github.com/MarlinFirmware/Marlin
离线
楼主 #3 2018-07-25 10:53:47 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).

串口输出:
start
echo:Marlin 1.1.8echo: Last Updated: 2017-12-25 12:00 | Author: BIQU
echo:Compiled: May 11 2018
echo: Free Memory: 3662 PlannerBufferBytes: 1232
echo:Hardcoded Default Settings Loaded
echo: G21 ; Units in mm
echo: M149 C ; Units in Celsiusecho:Filament settings: Disabled
echo: M200 D1.75
echo: M200 T1 D1.75
echo: M200 D0
echo:Steps per unit:
echo: M92 X100.00 Y100.00 Z100.00 E100.00
echo:Maximum feedrates (units/s):
echo: M203 X300.00 Y300.00 Z300.00 E200.00
echo:Maximum Acceleration (units/s2):
echo: M201 X1500 Y1500 Z1500 E1000
echo:Acceleration (units/s2): P<print_accel> R<retract_accel> T<travel_accel>
echo: M204 P2500.00 R3000.00 T3000.00
echo:Advanced: S<min_feedrate> T<min_travel_feedrate> B<min_segment_time_us> X<max_xy_jerk> Z<max_z_jerk> E<max_e_jerk>
echo: M205 S0.00 T0.00 B20000 X10.00 Y10.00 Z10.00 E5.00
echo:Hotend offsets:
echo: M218 T1 X0.00 Y0.00
echo:Auto Bed Leveling:
echo: M420 S0
echo:Endstop adjustment:
echo: M666 X0.00 Y0.00 Z0.00
echo:Delta settings: L<diagonal_rod> R<radius> H<height> S<segments_per_s> B<calibration radius> XYZ<tower angle corrections>
echo: M665 L337.59 R166.86 H310.00 S120.00 B115.00 X0.00 Y0.00 Z0.00
echo:Material heatup parameters:
echo: M145 S0 H200 B50 F0
echo: M145 S1 H230 B70 F0
echo:PID settings:
echo: M301 P24.77 I1.84 D83.61
echo:Z-Probe Offset (mm):
echo: M851 Z0.00
echo:SD init fail
离线
#4 2018-07-25 14:35:43 分享评论
- Mitko
- 会员
- 注册时间: 2018-03-13
- 已发帖子: 219
- 积分: 202
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
不太好。我建议您至少使用一个步进驱动器,如LV8729和32位MCU板。我目前正在开发3D打印控制板。等待接收一些LicheePi nano,但想要使用Allwiiner H2。 LicheePi Zero或OrangePi等板。
离线
楼主 #5 2018-07-25 14:47:44 分享评论
楼主 #6 2018-07-27 08:31:16 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).

https://item.taobao.com/item.htm?id=544494880989
https://item.taobao.com/item.htm?id=530325320025
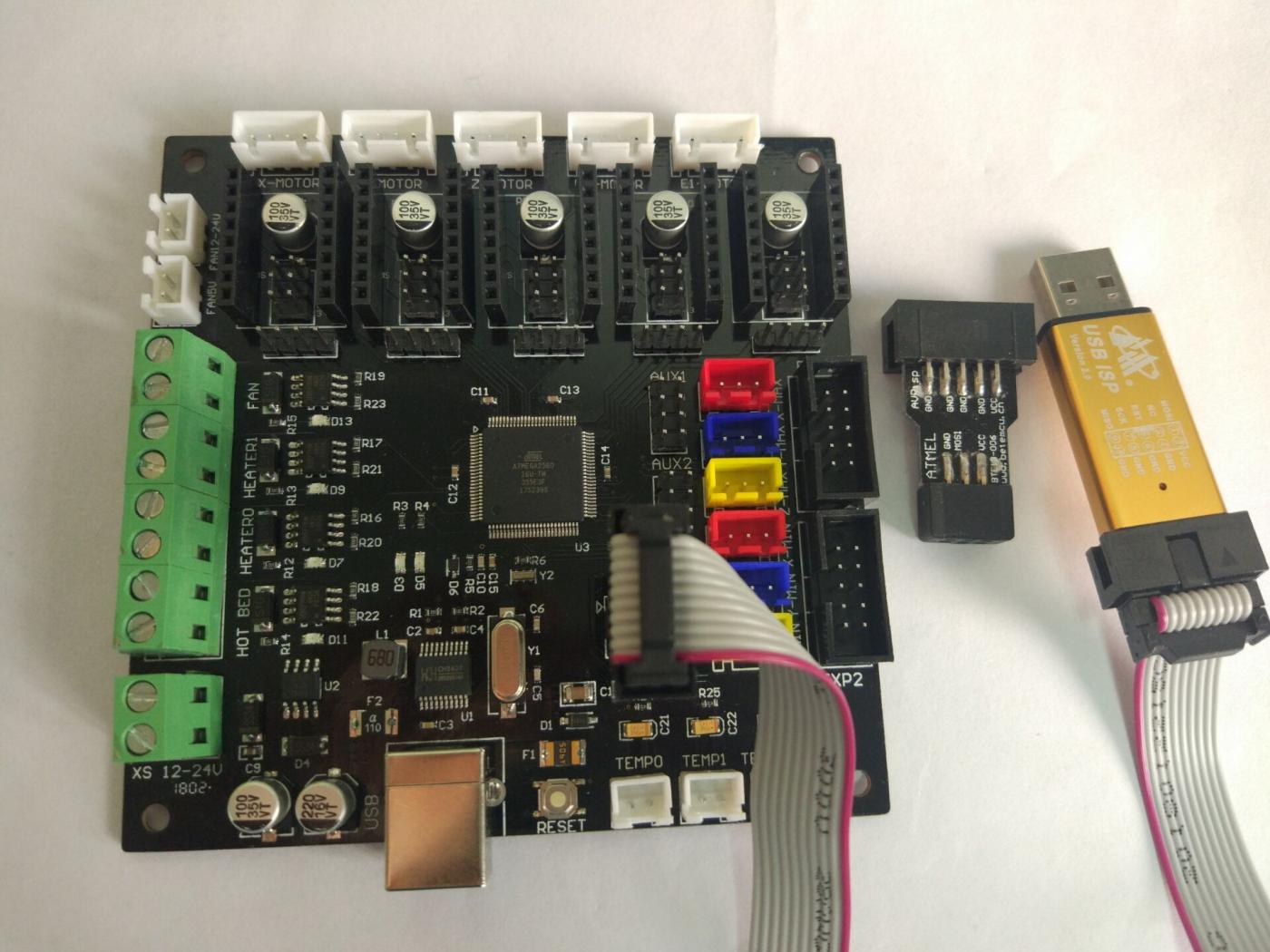
后来发现没有烧录器,不能继续愉快玩耍,所以赶紧淘宝买了一个 USBASP烧录器.
离线
楼主 #7 2018-07-27 08:35:19 分享评论
楼主 #8 2018-07-27 08:37:26 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
Arduino:1.8.5 (Windows 7), 开发板:"Arduino/Genuino Mega or Mega 2560, ATmega2560 (Mega 2560)"
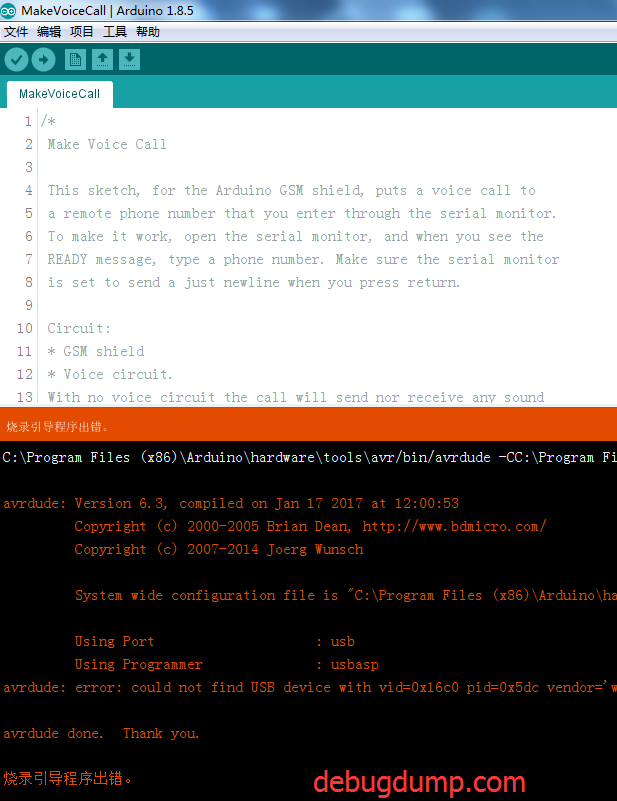
C:\Program Files (x86)\Arduino\hardware\tools\avr/bin/avrdude -CC:\Program Files (x86)\Arduino\hardware\tools\avr/etc/avrdude.conf -v -patmega2560 -cusbasp -Pusb -e -Ulock:w:0x3F:m -Uefuse:w:0xFD:m -Uhfuse:w:0xD8:m -Ulfuse:w:0xFF:m
avrdude: Version 6.3, compiled on Jan 17 2017 at 12:00:53
Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright (c) 2007-2014 Joerg WunschSystem wide configuration file is "C:\Program Files (x86)\Arduino\hardware\tools\avr/etc/avrdude.conf"
Using Port : usb
Using Programmer : usbasp
avrdude: error: could not find USB device with vid=0x16c0 pid=0x5dc vendor='www.fischl.de' product='USBasp'avrdude done. Thank you.
烧录引导程序出错。
使用 arduino ide 直接烧录出错.
离线
楼主 #9 2018-07-27 08:51:14 分享评论
离线
楼主 #10 2018-07-27 08:53:36 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
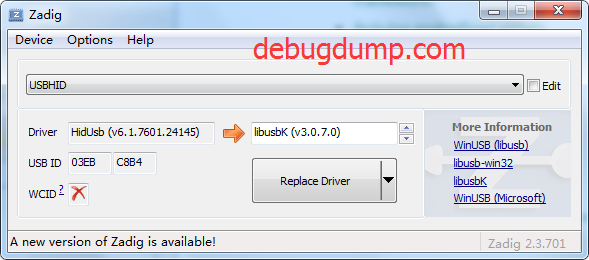
http://irq5.io/2017/07/25/making-usbasp-chinese-clones-usable/
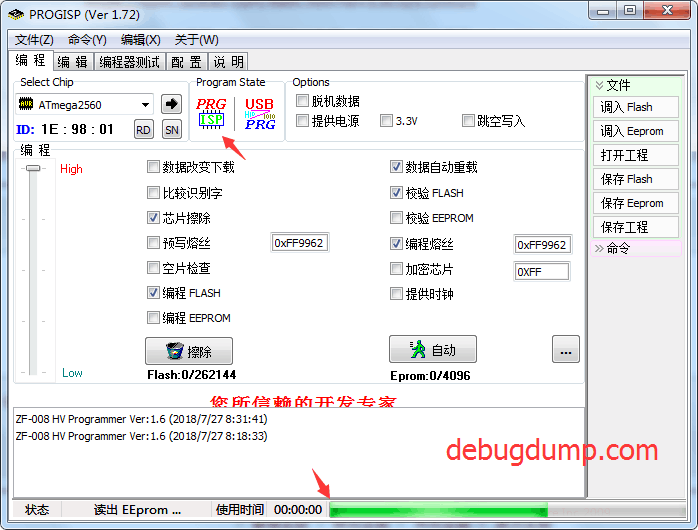
终于找到有用的了,
这哥们也是买了中国版的 usbasp,
结果此 usbasp并非彼 usbasp,
并不是标准的usbasp.
至于怎么能在 arduino ide 下用,还得仔细研究才行。
离线
楼主 #11 2018-07-28 10:29:53 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
https://www.arduino.cc/en/uploads/Main/arduino-uno-schematic.pdf
https://www.arduino.cc/en/uploads/Main/arduino-mega2560_R3-sch.pdf
arduino 官方两款开发板,淘宝挺多仿品, 理论上仿品不能随意使用 arduino 商标,
经过官方认证才可以使用,用以防止粗制滥造,但是大天朝没人管。
离线
#12 2018-07-30 21:57:41 分享评论
- awfans
- 会员
- 注册时间: 2018-04-03
- 已发帖子: 264
- 积分: 264
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
arduino 可以在线调试吗?
离线
楼主 #13 2018-07-31 13:34:01 分享评论
楼主 #14 2018-07-31 13:47:04 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
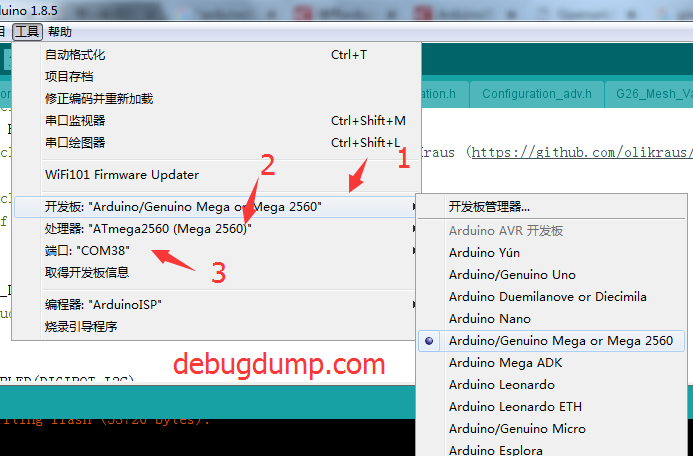


终于搞定 marlin 固件下载:
下载 Arduino 集成开发环境
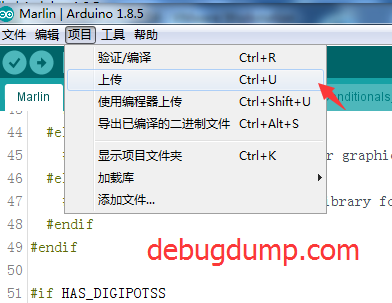
Arduino IDE 打开 Marlin\Marlin.ino 项目, 按上图设置好环境, 点击 [项目] -> [上传] 即可烧录.
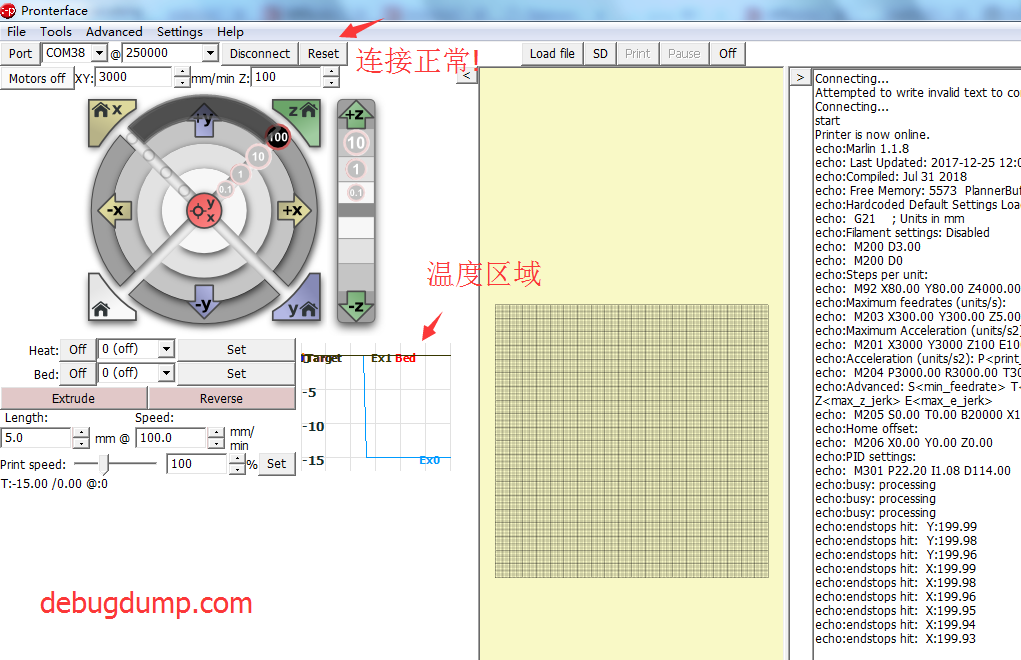
接上串口, 默认波特率 250000, 我的串口软件没有这个波特率,所以用接近的 256000.
波特率设置在 Configuration.h:#define BAUDRATE 250000
使用第三方3D打印机软件连接主板,
参考 https://whycan.cn/t_786.html
串口输出:
start
echo:Marlin 1.1.8echo: Last Updated: 2017-12-25 12:00 | Author: (none, default config)
echo:Compiled: Jul 31 2018
echo: Free Memory: 5573 PlannerBufferBytes: 1232
echo:Hardcoded Default Settings Loaded
echo: G21 ; Units in mmecho:Filament settings: Disabled
echo: M200 D3.00
echo: M200 D0
echo:Steps per unit:
echo: M92 X80.00 Y80.00 Z4000.00 E500.00
echo:Maximum feedrates (units/s):
echo: M203 X300.00 Y300.00 Z5.00 E25.00
echo:Maximum Acceleration (units/s2):
echo: M201 X3000 Y3000 Z100 E10000
echo:Acceleration (units/s2): P<print_accel> R<retract_accel> T<travel_accel>
echo: M204 P3000.00 R3000.00 T3000.00
echo:Advanced: S<min_feedrate> T<min_travel_feedrate> B<min_segment_time_us> X<max_xy_jerk> Z<max_z_jerk> E<max_e_jerk>
echo: M205 S0.00 T0.00 B20000 X10.00 Y10.00 Z0.30 E5.00
echo:Home offset:
echo: M206 X0.00 Y0.00 Z0.00
echo:PID settings:
echo: M301 P22.20 I1.08 D114.00
总算入坑了, 咨询了几个朋友才搞定的, 差点就放弃治疗了。
离线
#15 2018-07-31 13:52:41 分享评论
- abc3240660
- 会员
- 注册时间: 2018-07-31
- 已发帖子: 100
- 积分: 100
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
这么便宜就能搭一套3D打印机了啊!666
离线
楼主 #16 2018-07-31 13:55:07 分享评论
离线
#17 2018-07-31 14:02:14 分享评论
- abc3240660
- 会员
- 注册时间: 2018-07-31
- 已发帖子: 100
- 积分: 100
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
晕哥 wrote:
abc3240660 wrote:
这么便宜就能搭一套3D打印机了啊!666
上面只是3D打印机配件和主板更新固件.
这个才是3D打印机整机:
https://whycan.cn/t_784.html
那也不贵啊,突然有个想法,拿这套东东,去办个少儿兴趣培训机构,发财了发财了
离线
楼主 #18 2018-07-31 14:05:30 分享评论
- 晕哥
- 管理员
- 所在地: wechat: whycan_cn
- 注册时间: 2017-09-06
- 已发帖子: 9,492
- 积分: 9207
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
那是你对Arduino了解不多,
现在淘宝上的各种智能车整机和配件基本上被Arduino占领了,
Arduino非常适合青少年编程入门,
很多学校比较就直接买这种配件组装了。
Arduino平台下的轮子也特别多,
很多基于此的CNC平台比如上面的 marlin 3D打印机, 还有激光雕刻机什么的.
估计 ATMega2560 的销量靠 Arduino 系统撑着。
离线
#19 2018-07-31 14:11:15 分享评论
- abc3240660
- 会员
- 注册时间: 2018-07-31
- 已发帖子: 100
- 积分: 100
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
Arduino是没有用过,看样生态很重要啊
离线
#20 2022-10-08 20:12:03 分享评论
- qbwm
- 会员
- 注册时间: 2022-10-08
- 已发帖子: 5
- 积分: 5
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
marlin固件真的对新手太不友好了,没有一些准备根本玩不来。
离线
#21 2025-06-18 22:01:45 分享评论
- Rebiki
- 会员
- 注册时间: 2025-06-18
- 已发帖子: 16
- 积分: 1
Re: 买一块3D打印机主板(ATMega2560)玩一下 Arduino 开发(从入门到放弃).
Marlin 只有从头理解它才有趣
离线
东莞哇酷科技有限公司开发