楼主 #1 2019-03-26 20:31:55 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
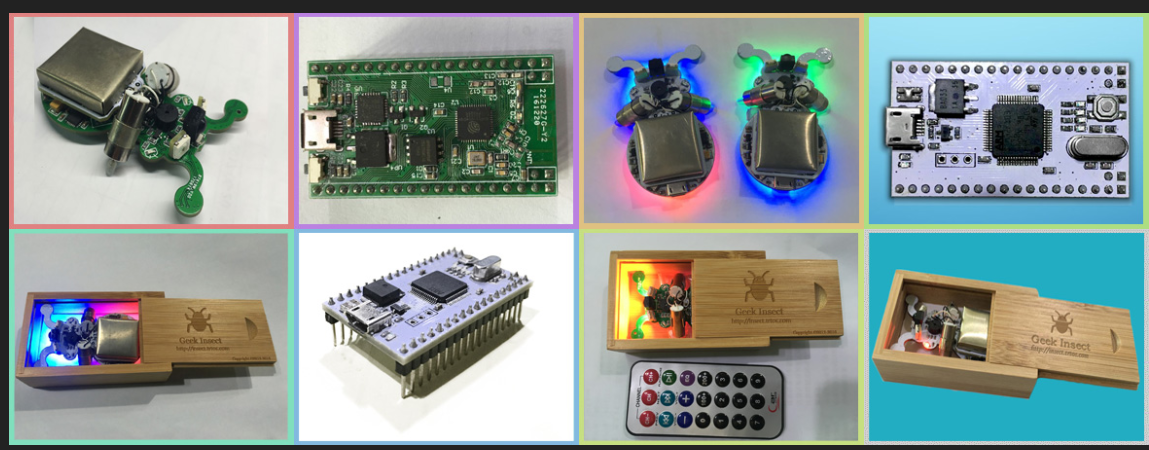
开源我做的智能小车
7个激光距离传感器(6个环境光传感器)
两个6mm直流电机
一个MPU9250 9轴
6个SK6812 LED
3个DMIC
主控是nrf52832核心板(淘宝有售)
我的目标是实现Ringo Robot和anki的Vector,大家可以搜下,尤其是Ringo,avr单片机实现了非常可爱的效果
下一步准备用X1000/X1500实现Linux开发机器视觉和声音定位识别等功能(还有个备选方案是K210)
电路原理图PCB: https://github.com/nanfang2000/zigbug_hw
固件代码:https://github.com/nanfang2000/zigbug_fw
最近编辑记录 达克罗德 (2019-03-26 22:18:28)
离线
楼主 #2 2019-03-26 20:41:02 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
Re: 开源我做的智能小车
NRF52832 蓝牙4.2模块/BLE/蓝牙5.0模组/NORDIC/电子/板载天线
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.18682e8dUaNGoB&id=528033264347&_u=qc9cub8295
主控板
离线
#3 2019-03-26 21:35:33 分享评论
- 真的是很烦
- 会员
- 注册时间: 2018-10-08
- 已发帖子: 162
- 积分: 154.5
Re: 开源我做的智能小车
作为围观群众, 强力插入前排围观
离线
#5 2019-03-27 08:57:02 分享评论
- ippen
- 会员
- 注册时间: 2018-07-22
- 已发帖子: 345
- 积分: 339.5
Re: 开源我做的智能小车
哇,这个要围观
离线
#6 2019-03-27 09:13:08 分享评论
- Ken
- 会员
- 注册时间: 2019-01-06
- 已发帖子: 59
- 积分: 54
Re: 开源我做的智能小车
这个要赞。Mark一下。
离线
#7 2019-03-27 09:39:10 分享评论
- 微凉VeiLiang
- 会员

- 所在地: 深圳
- 注册时间: 2018-10-28
- 已发帖子: 649
- 积分: 539
- 个人网站
Re: 开源我做的智能小车
支持,小robot蛮可爱的
离线
#8 2019-03-27 13:58:57 分享评论
- Jmhh247
- 会员
- 注册时间: 2018-12-21
- 已发帖子: 262
- 积分: 262
Re: 开源我做的智能小车
赞,围观支持!
离线
#9 2019-04-28 15:51:57 分享评论
- v_8787
- 会员
- 注册时间: 2019-01-31
- 已发帖子: 52
- 积分: 26.5
Re: 开源我做的智能小车
楼主,请问MDK是什么版本的啊,打开工程提示没有安装NRF52832
谢谢
离线
#10 2019-04-28 16:48:18 分享评论
- 帅气皮皮马
- 会员
- 注册时间: 2019-04-28
- 已发帖子: 1
- 积分: 1
Re: 开源我做的智能小车
这个是真大神啊,牛
离线
#11 2019-05-08 20:44:58 分享评论
- asydynamics
- 会员
- 注册时间: 2019-05-08
- 已发帖子: 3
- 积分: 3
Re: 开源我做的智能小车
有意思,可以针对这个做个课程 做steam教育
离线
楼主 #12 2019-05-08 21:36:55 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
Re: 开源我做的智能小车
v_8787 wrote:
楼主,请问MDK是什么版本的啊,打开工程提示没有安装NRF52832
谢谢
要用Segger的embedded studio打开
离线
#13 2020-06-19 10:50:31 分享评论
- daat
- 会员
- 注册时间: 2020-06-19
- 已发帖子: 4
- 积分: 4
Re: 开源我做的智能小车
小车在桌子上掉不下去,什么原理
离线
#14 2020-06-19 15:15:42 分享评论
- lgkgkfg
- 会员
- 注册时间: 2020-06-19
- 已发帖子: 10
- 积分: 10
Re: 开源我做的智能小车
厉害了,看看学习一下硬件设计
离线
#15 2020-06-19 18:30:20 分享评论
- shoutdn
- 会员
- 注册时间: 2020-06-19
- 已发帖子: 1
- 积分: 1
Re: 开源我做的智能小车
厉害了,自己造自己的玩具
离线
#16 2020-08-06 15:08:39 分享评论
- ggzzc
- 会员
- 注册时间: 2020-06-29
- 已发帖子: 22
- 积分: 1.5
Re: 开源我做的智能小车
楼主还在继续做吗,我买了个底座(舵机加俩直流电机)一直没动手,想用SMT32MP157做,M4实现控制电机和传感器采集,两个A7核一个处理摄像头数据,一个负责通信(4G+WIFI/BT),工作量很大,一直没空,不过MP157核心板画差不多了。
离线
#17 2020-08-06 17:42:38 分享评论
离线
#18 2020-08-06 17:47:03 分享评论
离线
楼主 #19 2020-08-06 20:18:19 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
Re: 开源我做的智能小车
ggzzc wrote:
楼主还在继续做吗,我买了个底座(舵机加俩直流电机)一直没动手,想用SMT32MP157做,M4实现控制电机和传感器采集,两个A7核一个处理摄像头数据,一个负责通信(4G+WIFI/BT),工作量很大,一直没空,不过MP157核心板画差不多了。
一直在构思第二版,也用个高端CPU跑Linux和摄像头。我想跑双目,否则小虫没有真正的机器视觉,就像没头苍蝇一样。不过这样体积功耗都上去了,达不到我的要求。希望以后新芯片和新技术能让我实现自己的想法
离线
楼主 #20 2020-08-06 20:21:08 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
Re: 开源我做的智能小车
tongjinlv wrote:
你这个很像Ringo,我的这个小玩具就是受到Ringo的inspire
离线
#21 2020-08-07 10:08:23 分享评论
- ggzzc
- 会员
- 注册时间: 2020-06-29
- 已发帖子: 22
- 积分: 1.5
Re: 开源我做的智能小车
达克罗德 wrote:
一直在构思第二版,也用个高端CPU跑Linux和摄像头。我想跑双目,否则小虫没有真正的机器视觉,就像没头苍蝇一样。不过这样体积功耗都上去了,达不到我的要求。希望以后新芯片和新技术能让我实现自己的想法
性能高的功耗都高,矛盾关系,我准备用7.4V/2000mAh动力电池
离线
#22 2020-08-10 20:43:32 分享评论
- swt518
- 会员
- 注册时间: 2020-04-01
- 已发帖子: 0
- 积分: 0
Re: 开源我做的智能小车
这个要赞。Mark一下。
离线
#23 2020-08-11 17:31:06 分享评论
- dragoniye
- 会员
- 注册时间: 2019-02-07
- 已发帖子: 39
- 积分: 37.5
Re: 开源我做的智能小车
大神 请收下我的膝盖
离线
楼主 #24 2021-08-24 01:02:03 分享评论
- 达克罗德
- 会员
- 注册时间: 2018-04-10
- 已发帖子: 1,140
- 积分: 1092.5
Re: 开源我做的智能小车
加了点openmv的小球追踪,效果不太好。
最近编辑记录 达克罗德 (2021-08-24 01:02:35)
离线
#25 2021-08-24 09:36:42 分享评论
- codetez
- 会员
- 注册时间: 2020-05-23
- 已发帖子: 72
- 积分: 47
Re: 开源我做的智能小车
楼主,太赞了
离线
东莞哇酷科技有限公司开发