- 首页
- » 全志 SOC
- » 开源一个V3s的飞控板
楼主 # 2022-02-24 01:12:42 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
开源一个V3s的飞控板
工程地址在JLC,第二次用LC EDA了,说实话,找封装比较方便,但是很多点实在用的比较难受
https://oshwhub.com/Nccer/my_v3s_copy
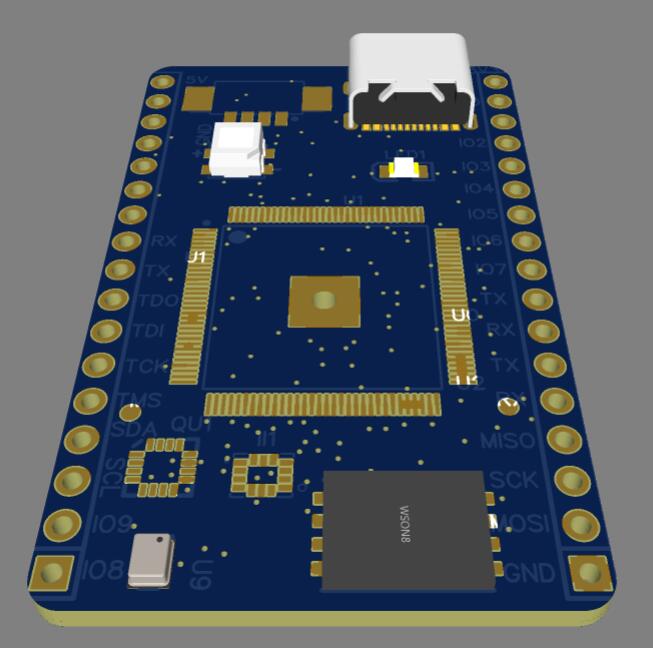
板载ICM20600/spl06/QMC5883L, 还有一片高云的FPGA(用来输出PWM)
这是第二版了,第一板就是下图那个比较大的方方正正的板子,那是第一次用LC EDA,画完回来发现忘记画LED了,上电一个灯都亮着实有点慌
再加上上面没有磁力计,于是就琢磨着画了第二版,把一些电机驱动电路/锂电池充电电路给去了(原来是希望能直接控制一个空心杯四轴的),
画得更小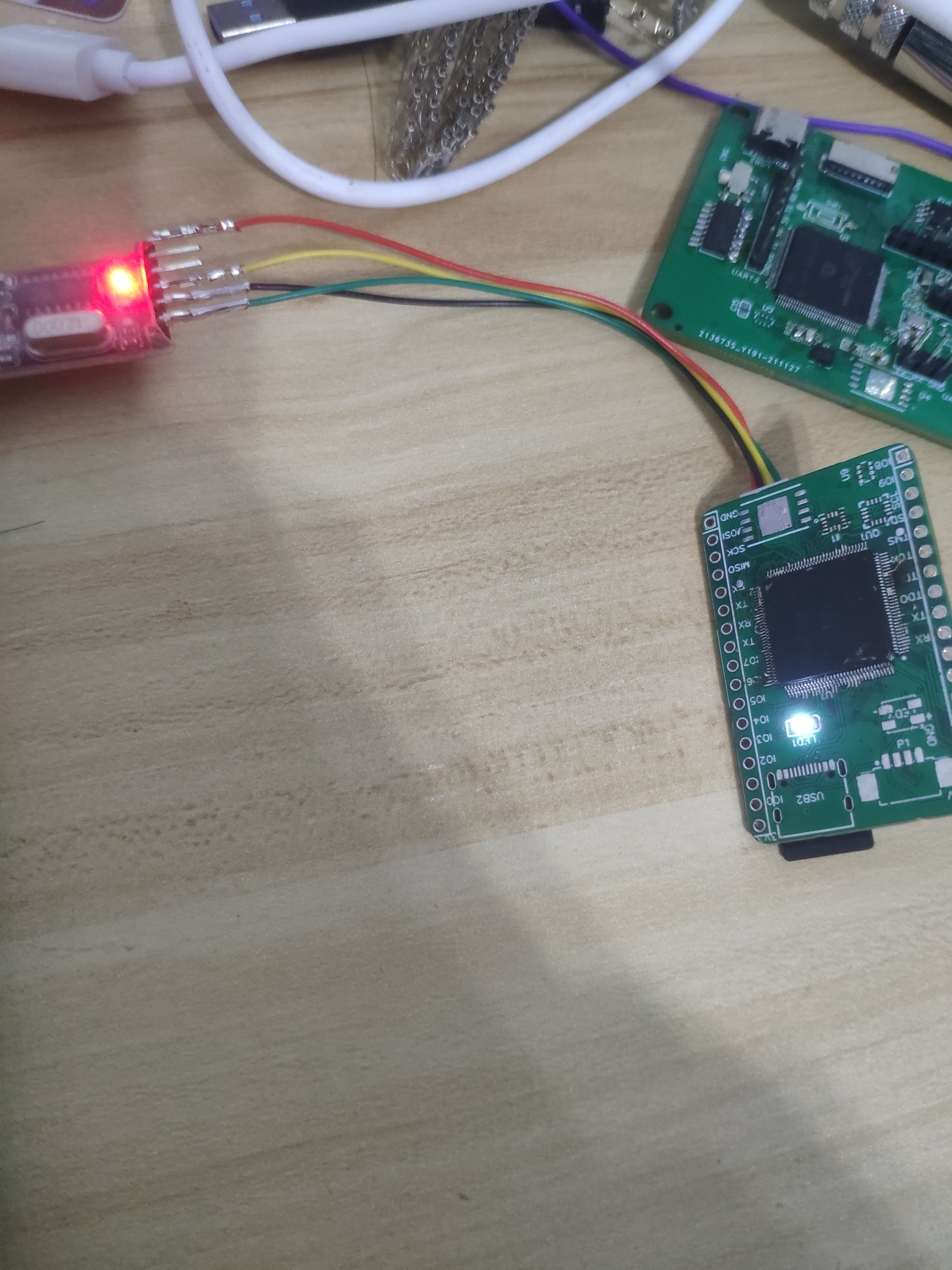
焊得有点叙利亚成色了,因为这个芯片是吹下来的,希望能白嫖晕个的两片V3s,下次焊新芯片
调试记录,正常启动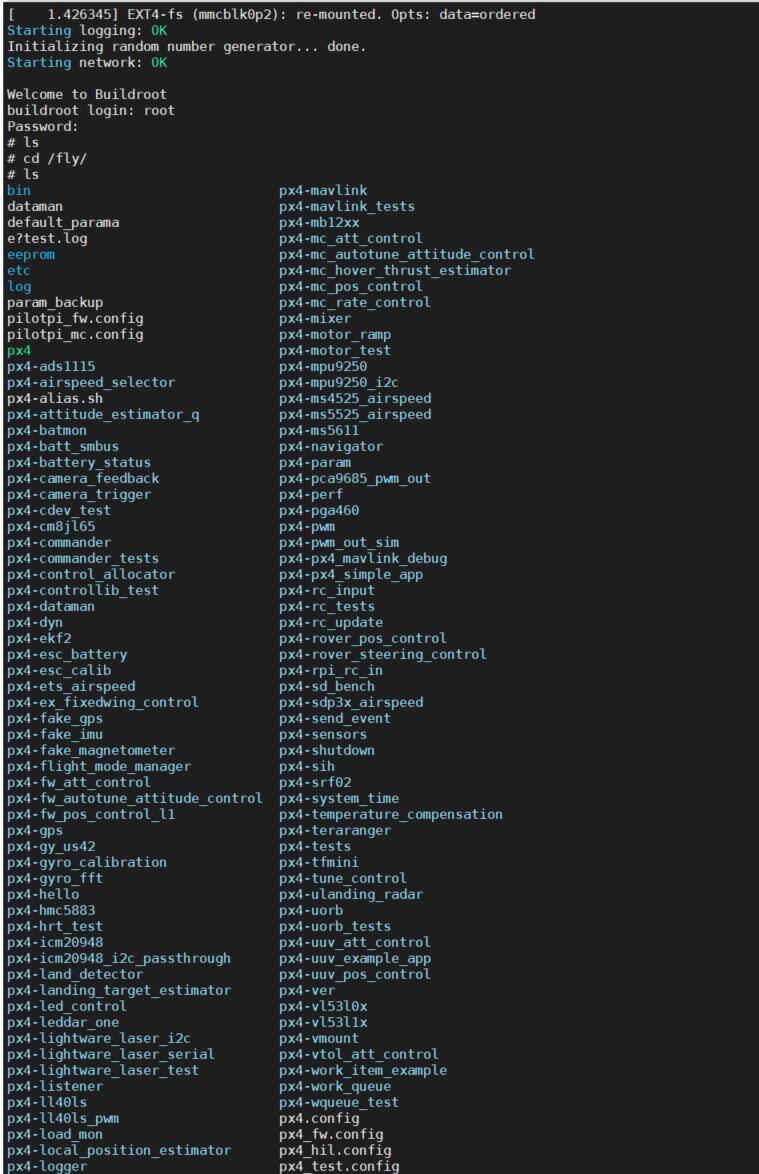
离线
#1 2022-02-24 09:47:01 分享评论
- cube
- 会员
- 注册时间: 2021-03-11
- 已发帖子: 288
- 积分: 202.5
Re: 开源一个V3s的飞控板
楼主出套件吗?
离线
#3 2022-02-24 10:09:35 分享评论
- hotkey
- 会员
- 注册时间: 2019-06-23
- 已发帖子: 76
- 积分: 101
Re: 开源一个V3s的飞控板
选这个芯片是为了方便装摄像头么?
离线
楼主 #4 2022-02-24 10:21:11 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
Re: 开源一个V3s的飞控板
cube wrote:
楼主出套件吗?
目前没时间搞呀
离线
楼主 #5 2022-02-24 10:26:44 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
Re: 开源一个V3s的飞控板
hotkey wrote:
选这个芯片是为了方便装摄像头么?
其实主要是看上了:
芯片方便手焊
自带内存,不需要走DDR线(我也没走过高速电路)
arm A7 核,性能还可以接受
实际用上之后,最主要的问题在于PWM通道不够,最近又发现了新的好东西T113, 好像有8路PWM输出,对于飞控来说很方便。
至于摄像头,确实有想过把飞控+图传集成在一起,但是怕有点带不动,不是主要目的,可能等基本功能OK之后会测试看看
最近编辑记录 ncer (2022-02-24 10:34:22)
离线
#6 2022-02-24 17:50:56 分享评论
- dtsayhi
- 会员
- 注册时间: 2022-02-11
- 已发帖子: 27
- 积分: 12
Re: 开源一个V3s的飞控板
老哥姿态检测之类的实时性应该没问题吧。准备用WIFI还是2.4G
离线
楼主 #7 2022-02-25 15:11:19 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
Re: 开源一个V3s的飞控板
dtsayhi wrote:
老哥姿态检测之类的实时性应该没问题吧。准备用WIFI还是2.4G
不跑其他程序的话,实时性应该还可以。
遥控打算使用ELRS,目前在航模界大量应用了,基本就是esp32+LORA芯片(2.4G 或者 900M),与飞控通过串口通信。
离线
#8 2022-02-25 18:54:43 分享评论
- dtsayhi
- 会员
- 注册时间: 2022-02-11
- 已发帖子: 27
- 积分: 12
Re: 开源一个V3s的飞控板
@ncer
厉害厉害
离线
楼主 #9 2022-04-16 15:19:40 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
Re: 开源一个V3s的飞控板
做了一些更新,考虑到要用在飞机上,使用sd卡很不安全,目前的版本换成了SD NAND。
重新用kicad画了:
https://github.com/Ncerzzk/AutoPilotPi-Hardware
离线
#11 2022-04-17 17:10:58 分享评论
- yelong98
- 会员
- 注册时间: 2020-06-03
- 已发帖子: 97
- 积分: 59.5
Re: 开源一个V3s的飞控板
碰到一个用kicad的,棒,帮顶
离线
#12 2022-04-17 19:01:45 分享评论
- happy粥
- 会员
- 注册时间: 2022-04-12
- 已发帖子: 8
- 积分: 18
Re: 开源一个V3s的飞控板
用的什么系统啊Linux么
离线
楼主 #13 2022-04-17 22:13:06 分享评论
- ncer
- 会员
- 注册时间: 2021-06-01
- 已发帖子: 39
- 积分: 74.5
Re: 开源一个V3s的飞控板
happy粥 wrote:
用的什么系统啊Linux么
linux,至少要开启软实时(CONFIG_PREEMPT)
离线
#14 2025-10-17 19:44:52 分享评论
- maozheng110
- 会员
- 注册时间: 2024-10-01
- 已发帖子: 35
- 积分: 20
Re: 开源一个V3s的飞控板
手工焊接的?有粘锡
离线
- 首页
- » 全志 SOC
- » 开源一个V3s的飞控板
东莞哇酷科技有限公司开发