- 首页
- » 搜索
- » 奔跑的孩子 发表的帖子
页次: 1
#1 Re: 全志 SOC » 开源自己的Openwrt衍生版 HandsomeMod 支持f1c100s/f1c200s v3s » 2021-10-08 10:42:47
https://github.com/tinalinux/package/tree/r16-v2.1.y/qt/qt5
有些版本的tina确实自带了 Qt5
#2 Re: 全志 SOC » Allwinner S3 u-boot 2020.04 (DisplayEngine2 + Fastboot线刷) » 2021-10-07 12:20:57
aodzip wrote:
流氓兔 wrote:
好像不支持 SPI FLASH, 大佬可以把这个代码合并进去吗?
https://github.com/Lichee-Pi/u-boot/commits/v3s-spi-experimental
等我有能测试SPI设备的时候再搞
基本全了,只差SPI FLASH
#3 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » V3s控制GPIO扩展芯片 NXP PCF8574, 可以读IO电平,但是怎么也写不了低电平,请各位大佬帮我瞅瞅 » 2021-07-26 10:19:34
https://github.com/torvalds/linux/blob/master/drivers/gpio/gpio-74x164.c
https://www.kernel.org/doc/Documentation/devicetree/bindings/gpio/fairchild%2C74hc595.yaml
74HC595 / 74HC164 在 Linux 用 SPI 驱动 74HC595/164 ^_^
#4 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 在V3S上试着跑了一下新版的LVGL-8.1 界面效果越来越赞! » 2021-06-28 11:07:27
#5 Re: 全志 SOC » 找到一个 解压/解包 全志烧录文件img的工具 » 2021-05-29 09:20:50
#11 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » MDK + GCC + JLINK 从入门到放弃 » 2021-05-25 14:59:06
下载: qemu_arm_samples_modify.7z
qemu_arm_samples\swi01\swi01.uvproj
MDK 可以测试, 记得安装对应的软件包.
---------------------------------------------
支持ARM7/9旧器件的 MDK 版本:
http://www2.keil.com/mdk5/legacy/
https://armkeil.blob.core.windows.net/legacy/MDK79525.EXE
https://armkeil.blob.core.windows.net/legacy/MDK79524.EXE
#12 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » MDK + GCC + JLINK 从入门到放弃 » 2021-05-25 10:38:07
#13 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » MDK + GCC + JLINK 从入门到放弃 » 2021-05-25 10:35:22
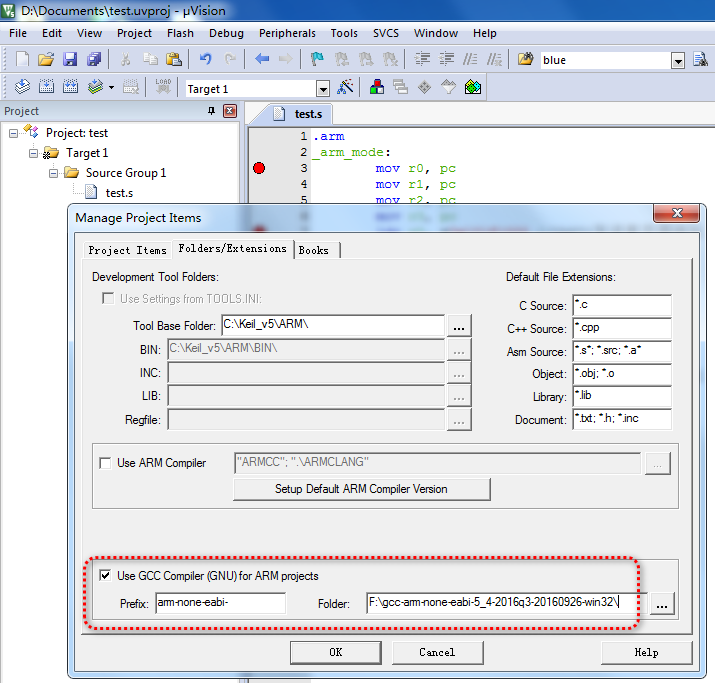
#14 DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » MDK + GCC + JLINK 从入门到放弃 » 2021-05-25 10:34:55
- 奔跑的孩子
- 回复: 3
win32 gcc下载: https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads
参考:
step by step 全志 f1c100s MDK 裸奔各种外设(参考N3290x)
https://whycan.com/t_1527.html
(出处:哇酷开发者社区)
#15 Re: 全志 SOC » 请问全志melis动态加载AXF(ELF)文件,如何实现的? » 2021-05-25 10:24:10
#16 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-25 10:19:20
#18 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-24 23:17:51
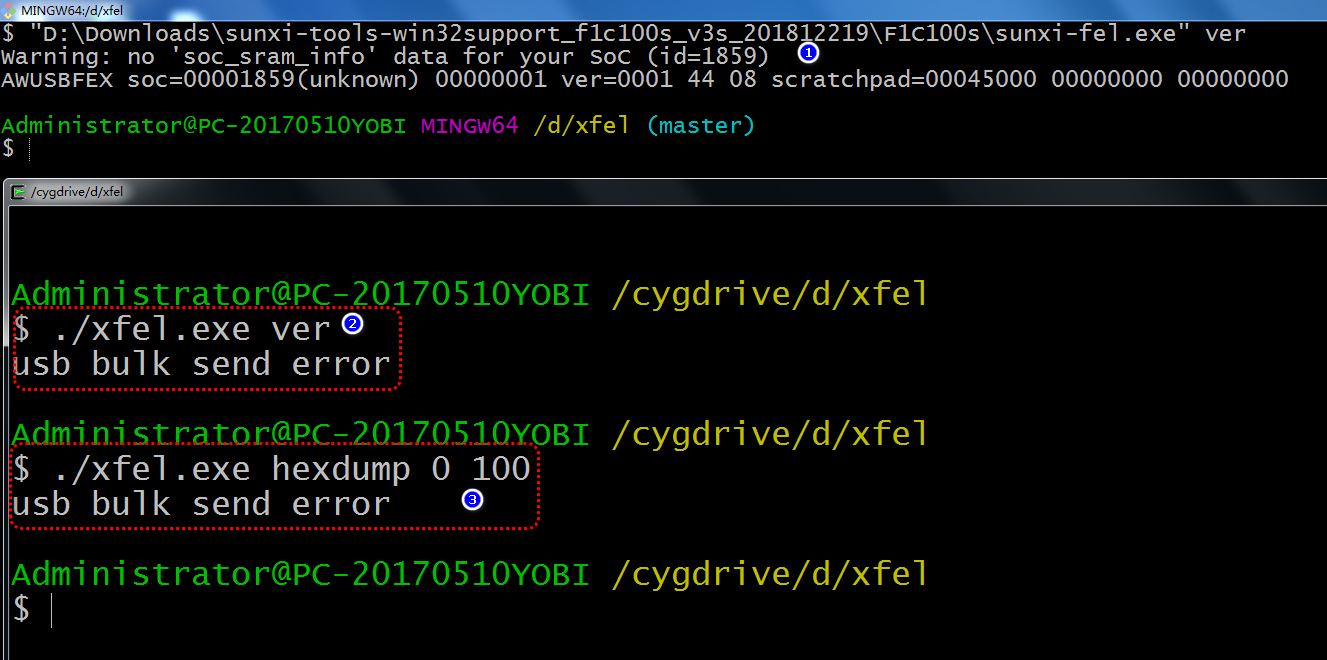
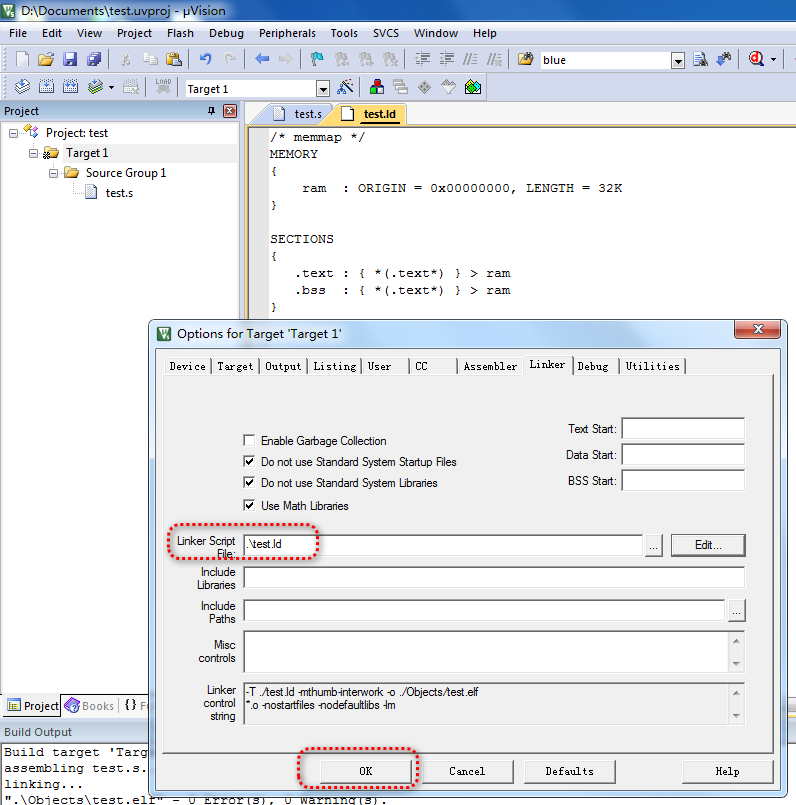
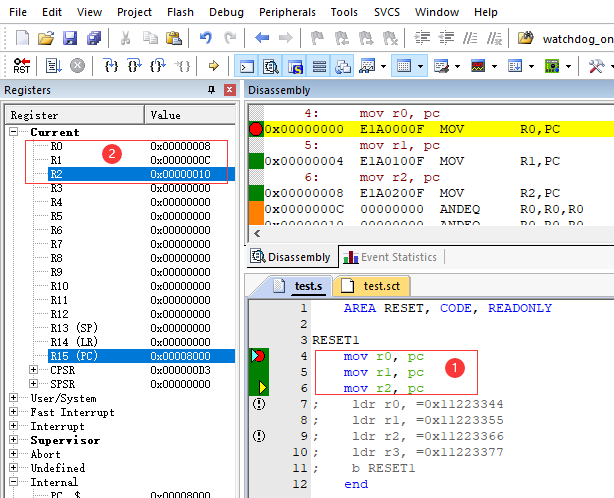
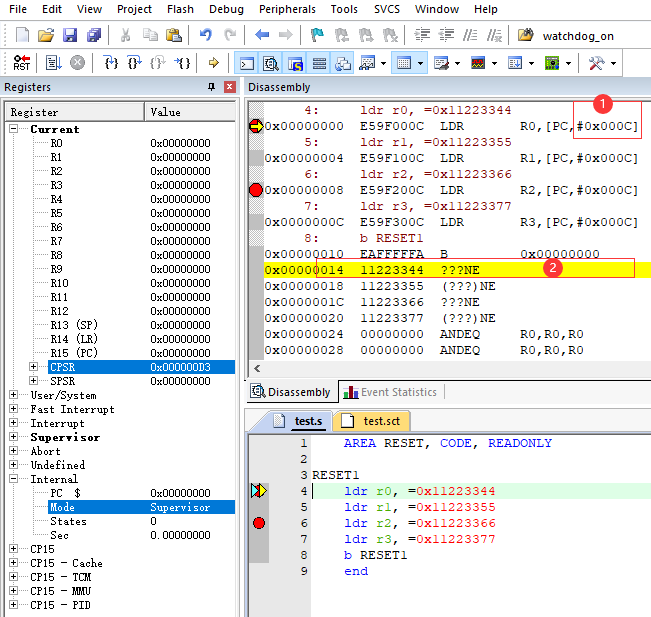
#20 Re: 全志 SOC » 请教一个 MDK 汇编基础问题, 为什么这里是 LDR R0, [PC, #0x0C] » 2021-05-24 22:58:27
https://www.cnblogs.com/lifexy/p/7117345.html
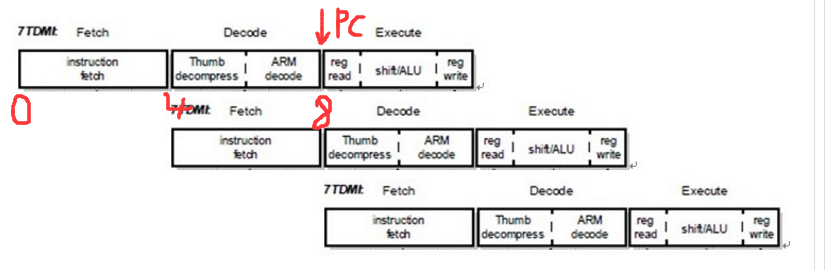
注:ARM9是3级流水线,也就是PC处理时正在执行第1条指令的同时对第2条指令进行译码,并将第3条指令从存储器中取出,如下图所示,PC总是指向第3条指令取值的地方。
#21 Re: 全志 SOC » 请教一个 MDK 汇编基础问题, 为什么这里是 LDR R0, [PC, #0x0C] » 2021-05-24 22:53:11
https://www.cnblogs.com/lifexy/p/7117345.html
LDR r1,[r2,#16] //将(r2+16)地址中的内容存到r1中
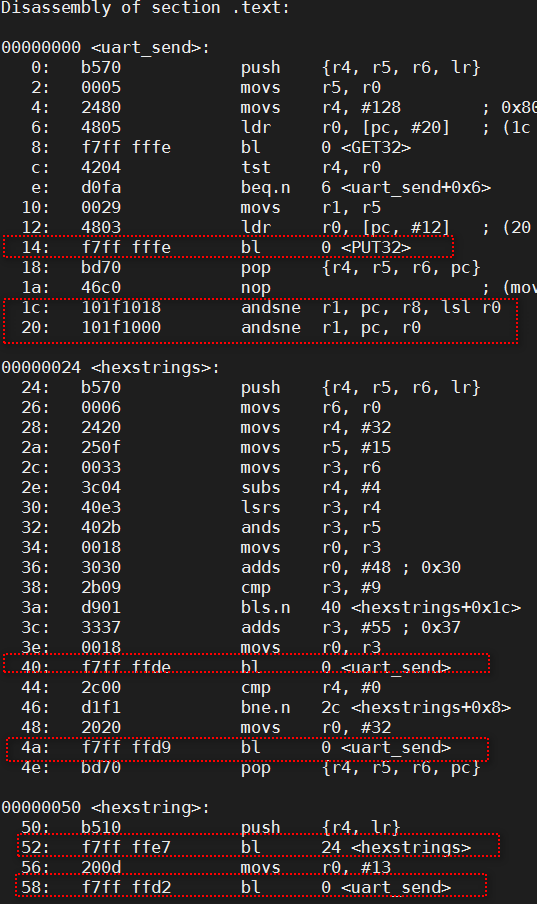
#24 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-24 12:15:45
这个代码不行:
.arm
_arm_mode:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x31 //输出1
str r1, [r0]
ldr r6, =_thumb_mode + 1
add r6, #1
// adr r6, _thumb_mode + 1
bx r6
.thumb
_thumb_mode:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x32 //输出2
str r1, [r0]
ldr r1, =0x33 //输出3
str r1, [r0]
ldr r1, =0x34 //输出4
str r1, [r0]
_loop:
b _loop //死循环
bx lr //跳回去生成的代码:
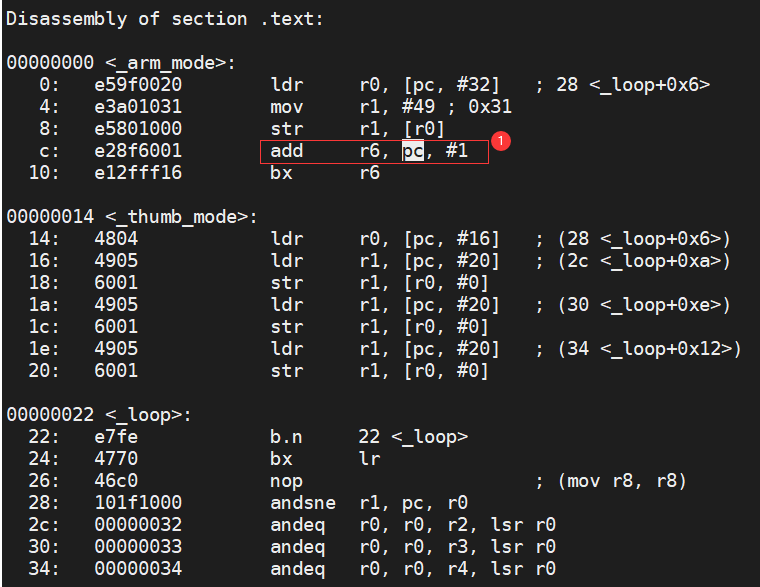
$ arm-linux-gnueabi-objdump -D strap.o
strap.o: file format elf32-littlearm
Disassembly of section .text:
00000000 <_arm_mode>:
0: e59f0024 ldr r0, [pc, #36] ; 2c <_loop+0x6>
4: e3a01031 mov r1, #49 ; 0x31
8: e5801000 str r1, [r0]
c: e59f601c ldr r6, [pc, #28] ; 30 <_loop+0xa>
10: e2866001 add r6, r6, #1
14: e12fff16 bx r6
00000018 <_thumb_mode>:
18: 4804 ldr r0, [pc, #16] ; (2c <_loop+0x6>)
1a: 4906 ldr r1, [pc, #24] ; (34 <_loop+0xe>)
1c: 6001 str r1, [r0, #0]
1e: 4906 ldr r1, [pc, #24] ; (38 <_loop+0x12>)
20: 6001 str r1, [r0, #0]
22: 4906 ldr r1, [pc, #24] ; (3c <_loop+0x16>)
24: 6001 str r1, [r0, #0]
00000026 <_loop>:
26: e7fe b.n 26 <_loop>
28: 4770 bx lr
2a: 10000000 andne r0, r0, r0
2e: 0019101f andseq r1, r9, pc, lsl r0
32: 00320000 eorseq r0, r2, r0
36: 00330000 eorseq r0, r3, r0
3a: 00340000 eorseq r0, r4, r0
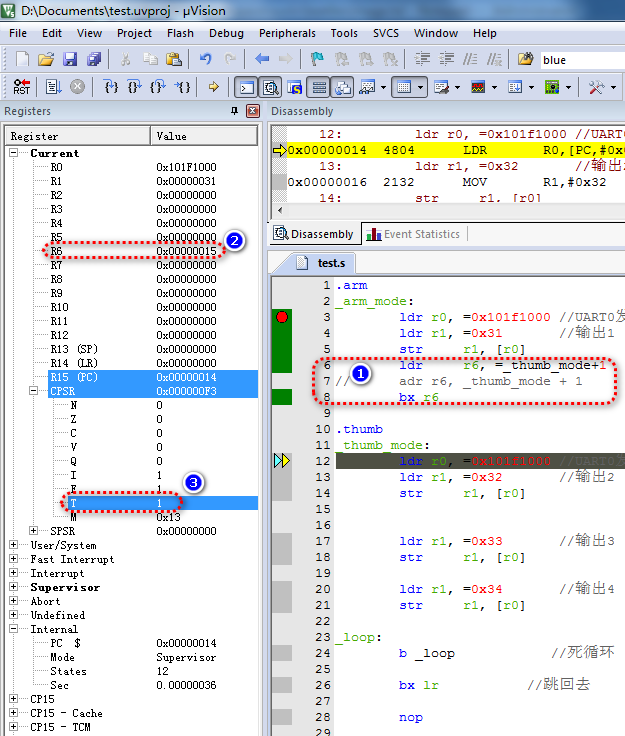
...这个是可以的:
.arm
_arm_mode:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x31 //输出1
str r1, [r0]
// ldr r6, =_thumb_mode + 1
// add r6, #1
adr r6, _thumb_mode + 1
bx r6
.thumb
_thumb_mode:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x32 //输出2
str r1, [r0]
ldr r1, =0x33 //输出3
str r1, [r0]
ldr r1, =0x34 //输出4
str r1, [r0]
_loop:
b _loop //死循环
bx lr //跳回去生成的代码:
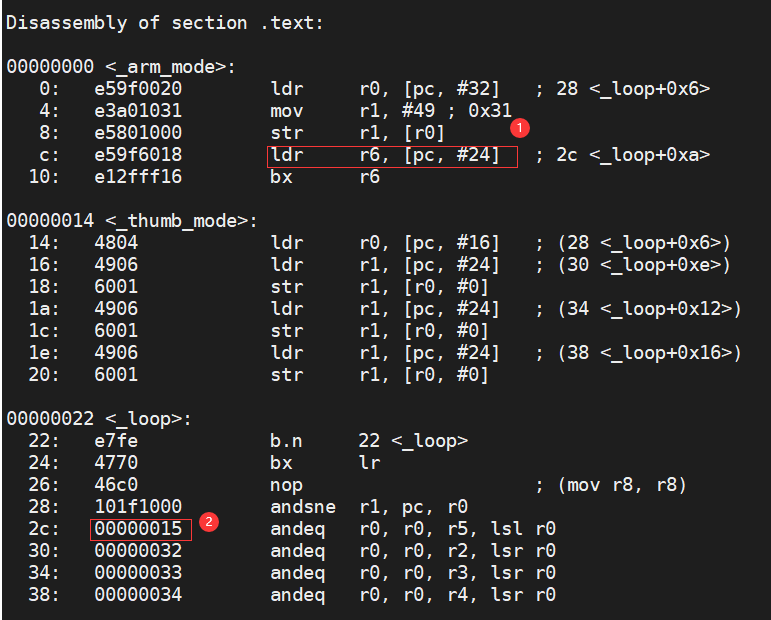
$ arm-linux-gnueabi-objdump -D strap.o
strap.o: file format elf32-littlearm
Disassembly of section .text:
00000000 <_arm_mode>:
0: e59f0020 ldr r0, [pc, #32] ; 28 <_loop+0x6>
4: e3a01031 mov r1, #49 ; 0x31
8: e5801000 str r1, [r0]
c: e28f6001 add r6, pc, #1
10: e12fff16 bx r6
00000014 <_thumb_mode>:
14: 4804 ldr r0, [pc, #16] ; (28 <_loop+0x6>)
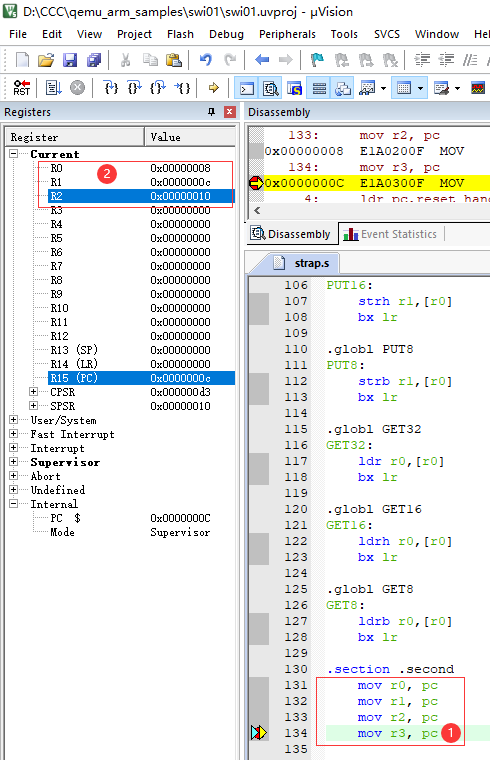
16: 4905 ldr r1, [pc, #20] ; (2c <_loop+0xa>)
18: 6001 str r1, [r0, #0]
1a: 4905 ldr r1, [pc, #20] ; (30 <_loop+0xe>)
1c: 6001 str r1, [r0, #0]
1e: 4905 ldr r1, [pc, #20] ; (34 <_loop+0x12>)
20: 6001 str r1, [r0, #0]
00000022 <_loop>:
22: e7fe b.n 22 <_loop>
24: 4770 bx lr
26: 10000000 andne r0, r0, r0
2a: 0032101f eorseq r1, r2, pc, lsl r0
2e: 00330000 eorseq r0, r3, r0
32: 00340000 eorseq r0, r4, r0难道是ldr伪指令不能生成跳转到thumb?
#25 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-24 09:15:56
.arm
_reset:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x31 //输出1
str r1, [r0]
// ldr r0, =_thumb_mode + 1
adr r0, _thumb_mode + 1
bx r0
.thumb
_thumb_mode:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x32 //输出2
str r1, [r0]
ldr r1, =0x33 //输出3
str r1, [r0]这样可以输出 123 了, 前面没有初始化 r0 寄存器.
再加上
ldr r0, =_thumb_mode + 1
替换
adr r0, _thumb_mode + 1
$ qemu-system-arm -M versatilepb -m 128M -nographic -kernel notmain.bin
123请问@aozima老大,为什么ldr指令不可以呢?
#26 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-21 09:26:05
#27 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-20 10:25:03
strap.s
.arm
_reset:
ldr r0, =0x101f1000 //UART0发送寄存器地址
ldr r1, =0x31 //输出1
str r1, [r0]
ldr r0, =_thum_mode + 1
bx r0
.thumb
_thum_mode:
ldr r1, =0x32 //输出2
str r1, [r0]
ldr r1, =0x33 //输出3
str r1, [r0]@aozima 再请教大佬一个问题,为什么这个代码只能输出 1呢, 不能输出 2, 3
$ arm-linux-gnueabi-objdump -D strap.o
strap.o: file format elf32-littlearm
Disassembly of section .text:
00000000 <_reset>:
0: e59f0014 ldr r0, [pc, #20] ; 1c <_thum_mode+0x8>
4: e3a01031 mov r1, #49 ; 0x31
8: e5801000 str r1, [r0]
c: e59f000c ldr r0, [pc, #12] ; 20 <_thum_mode+0xc>
10: e12fff10 bx r0
00000014 <_thum_mode>:
14: 4903 ldr r1, [pc, #12] ; (24 <_thum_mode+0x10>)
16: 6001 str r1, [r0, #0]
18: 4903 ldr r1, [pc, #12] ; (28 <_thum_mode+0x14>)
1a: 6001 str r1, [r0, #0]
1c: 101f1000 andsne r1, pc, r0
20: 00000015 andeq r0, r0, r5, lsl r0
24: 00000032 andeq r0, r0, r2, lsr r0
28: 00000033 andeq r0, r0, r3, lsr r0
Disassembly of section .ARM.attributes:
00000000 <.ARM.attributes>:
0: 00001941 andeq r1, r0, r1, asr #18
4: 61656100 cmnvs r5, r0, lsl #2
8: 01006962 tsteq r0, r2, ror #18
c: 0000000f andeq r0, r0, pc
10: 00543505 subseq r3, r4, r5, lsl #10
14: 01080306 tsteq r8, r6, lsl #6
18: Address 0x0000000000000018 is out of bounds.我照着书本写的, 基于arm926, 明明切换到了thumb模式。
#28 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 20:39:31
#29 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 17:30:41
#30 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 15:26:30
#31 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 15:24:18
#32 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 15:16:52
#33 DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教大家一个问题,thumb状态下,每一条指令都是16bit长度吗? » 2021-05-19 15:13:06
#35 Re: 全志 SOC » V3S tina系统 如何添加外置RTC » 2021-05-13 14:44:52
#36 Re: 全志 SOC » V3S tina系统 如何添加外置RTC » 2021-05-13 14:40:35
#37 Re: 全志 SOC » 老人家,碰到新问题,mmcblk2变成了mmcblk1 » 2021-04-22 11:17:08
#38 Re: 全志 SOC » f1c200s运行tina抖屏问题,请大家支支招 » 2021-04-09 09:10:01
#40 Re: Nuvoton N32905/N32926/NUC972/N9H20/N9H26/N9H30 » GNAND init failed !!!!!!!! 硬件肯定没问题,我哪里配置错了。 » 2021-04-07 09:50:35
#42 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 请问一个windows祖传项目,只要include winsock2.h就会出现 GetSystemTime / HANDLE 链接出错 » 2021-03-24 20:15:48
#43 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 请问一个windows祖传项目,只要include winsock2.h就会出现 GetSystemTime / HANDLE 链接出错 » 2021-03-24 17:50:29
#44 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 请问一个windows祖传项目,只要include winsock2.h就会出现 GetSystemTime / HANDLE 链接出错 » 2021-03-24 15:00:55
#45 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 请问一个windows祖传项目,只要include winsock2.h就会出现 GetSystemTime / HANDLE 链接出错 » 2021-03-24 14:39:41
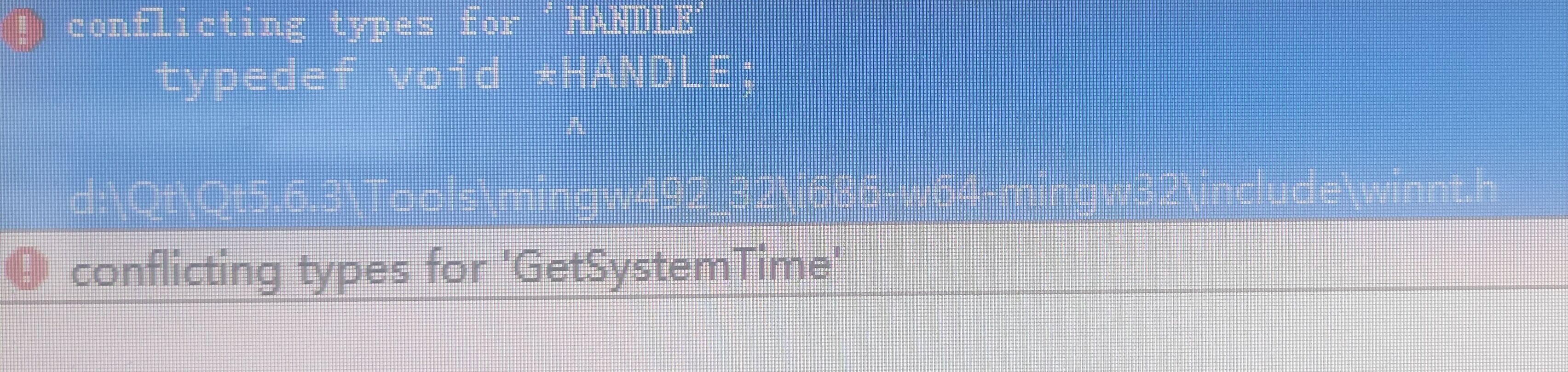
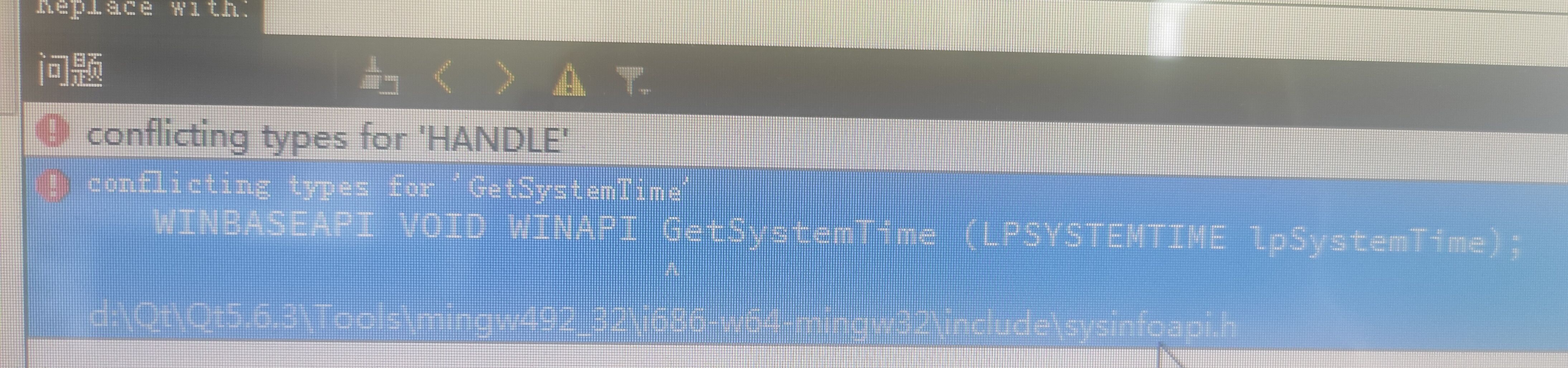
#46 Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 请问一个windows祖传项目,只要include winsock2.h就会出现 GetSystemTime / HANDLE 链接出错 » 2021-03-24 13:53:33
#48 Re: 全志 SOC » mount -t ntfs -o nls=utf8 /dev/mmcblk0p1 /mnt/udisk 挂载 ntfs 失败 » 2021-03-20 17:40:35
#49 Re: 全志 SOC » 帮定制V3S的sdk,有偿 » 2021-03-19 23:53:41
#55 Re: 全志 SOC » 荔枝派zero移植linux 5.2无法挂接spi norflash » 2021-03-06 09:21:44
看起来不像这个问题
A33 主线 Linux4.20, u-boot传入spi flash分区参数, 请教各位网友.
http://whycan.com/t_5150.html#p52393
#56 Re: 全志 SOC » 有用过ILI9488的RGB接口的朋友吗? » 2021-03-05 18:07:34
f_Endman wrote:
https://whycan.com/t_5652.html
我之前搞过个类似的屏,我的spi直接强行复用了rgb的数据引脚。你可以设置成rgb666然后只接rgb565,把多余的几个引脚接地就行了,或者刚好复用成软件spi。
咦,好聪明,我怎么没想到呢,浪费了三条腿,捂眼。。。
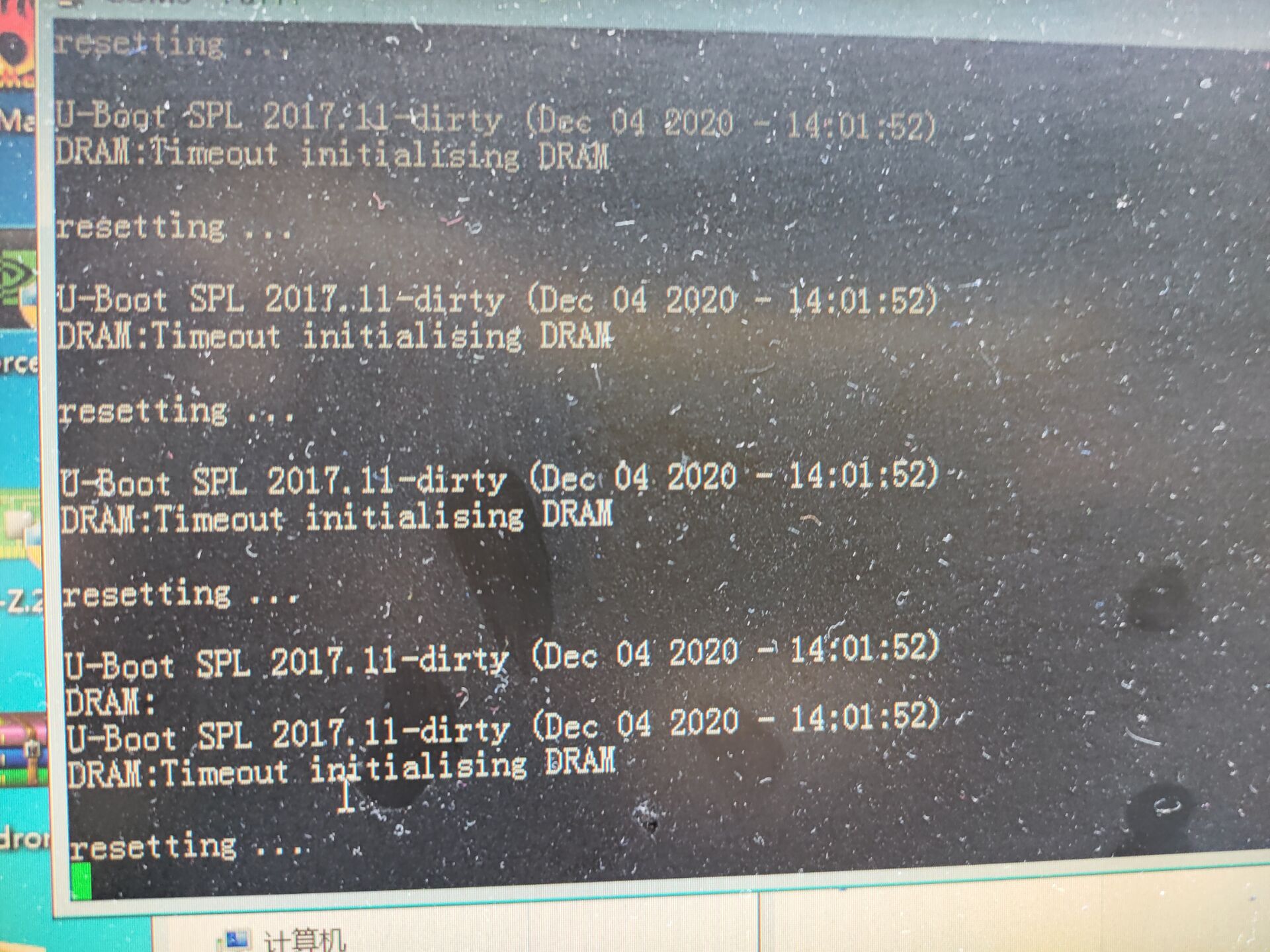
#58 Re: 全志 SOC » 想用F1C500S 替代F1C100S 跑裸机,发现跑不起来。 » 2021-03-05 08:31:09
#59 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 技术人的误区 » 2021-03-04 16:09:37
#60 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 技术人的误区 » 2021-03-04 15:11:14
#61 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 技术人的误区 » 2021-03-04 13:47:54
#62 Re: 全志 SOC » 荔枝派zero/小智极客S3/V3s使用sunxi-fel 借 u-boot 启动 Linux系统, 无需 spi flash / TF 卡 » 2021-03-04 11:47:28
#63 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 技术人的误区 » 2021-03-04 07:24:07
#64 Re: 全志 SOC » 编译Buildroot-tiny200时出现错误,请大佬指教,急急!!!!!!!!!!!!!!!!!!!!!!!1 (平台: 树梅派) » 2021-02-23 10:01:30
#67 Re: 全志 SOC » 请问 buildroot 根文件系统 ubi和ubifs有什么区别呢? » 2021-02-19 14:41:00
3.制作 ubifs
Ubifs 的制作需要以下两个命令
mkfs.ubifs: 制作 UBIFS image
ubinize:根据 UBIFS image 制作 ubi.img,这个 ubi.img 是通过 u-boot 直接烧写在 nand flash 分区上的。
AM335x Linux SDK 里面带有制作好的文件系统,是.tar.gz 的压缩文件,可以解压在
一个目录下做为 UBI 文件系统内容,如/home/usr/fs。
GPEVM 板上的 NAND 型号为 MT29F2G08,page size 为 2048B,block size 为
64x2048B=131072B,block count 为 2048。如果制作针对 GPEVM 板的 ubifs,执行
如下两条命令:
$ mkfs.ubifs –F -q -r /home/usr/fs -m 2048 -e 126976 -c 2047 -o ubifs.img
参数简介:
-F:使能"white-space-fixup",如果是通过 u-boot 烧写需要使能此功能。
-r:待制作的文件系统目录
-m:NAND FLASH 的最小读写单元,一般为 page size
-e:LEB size,对于 AM335x 的 NAND driver,为 block size-2x(page size)
-c:文件系统所占用的最大 block 数,一般小于等于 block count -1
-o:输出的 ubifs.img 文件
$ ubinize -o ubi.img -m 2048 -p 128KiB ubinize.cfg
参数简介:
-p:block size。
-m:NAND FLASH 的最小读写单元,一般为 page size
-o:输出的 ubi.img 文件
ubinize.cfg 为 ubinize 所需要的配置文件,内容如下:
[ubifs]
mode=ubi
image=ubifs.img
vol_id=0
vol_size=200MiB
vol_type=dynamic
vol_name=rootfs
vol_flags=autoresize4.烧写 ubifs
可通过 u-boot 命令将生成的 ubi.img(25M)烧写到 NAND FLASH 分区上,如下示
例是将 ubi.img 先存储到 SD 卡上,然后通过 u-boot 的 fatload 命令将其拷贝至内存
中。
u-boot# mw.b 0x82000000 0xFF
u-boot# mmc rescan
u-boot# fatload mmc 0 0x82000000 ubi.img
u-boot# nand erase 0x00780000 0xF880000
u-boot# nand write 0x82000000 0x00780000 0x1E000005.Linux 启动设置
在 U-boot 下设置启动信息如下:
#setenv bootargs 'console=ttyO0,115200n8 noinitrd ip=off mem=256M
rootwait=1 rw ubi.mtd=7,2048 rootfstype=ubifs root=ubi0:rootfs
init=/init'以上是转载
#68 Re: SigmaStar/SSD201/SSD202/SSD212 » 有一个对标F1C800的芯片SigmaStar SSD201有谁了解吗 双核A7 » 2021-02-19 13:50:21
#69 Re: SigmaStar/SSD201/SSD202/SSD212 » 启明云端的7寸 1024*600 LCD SSD202 开发板从入门到放弃 » 2021-02-19 13:48:50
fogwizard wrote:
ssd201的sdk默认不支持双缓冲,lvgl跑起来有撕裂感,是否有优化方法?
LVGL的linux_frame_buffer项目加入FB双缓
http://whycan.com/t_5887.html
(出处:哇酷开发者社区)
#71 Re: 全志 SOC » mangopi_r3 buildroot失败 » 2021-02-18 16:28:57
#73 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 求一款能做时钟主控的核心板或模组 » 2021-02-16 22:13:55
奔跑的孩子 wrote:
STM8L + PCF8563(I2C)
不得不说, V3s的RTC就是渣渣, 电流10uA, 导致CR2032纽扣电池很快就放完电了, 不得不赶工改用PCF8563或者别的RTC
http://whycan.com/t_3787.html#p34893
(出处:哇酷开发者社区)
这个楼主测得8563电流 0.25uA
#75 Re: 全志 SOC » 请问各位大神 v3s bsp 3.4内核如何录音,播放声音? » 2021-02-16 21:41:34
#77 Re: 全志 SOC » V3S添加以太网failed to get TX clock是什么原因呢? » 2021-02-03 14:02:59
Allwinner S3 uboot 2020.01 (开机Logo + LCD + 以太网 + SDC 2)
http://whycan.com/t_3865.html
(出处:哇酷开发者社区)
#82 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 荔枝派nano移植lvgl6.0后同步显示两个画面? » 2021-01-31 12:14:34
#83 Re: 全志 SOC » 记录使用最新Buildroot一键编译V3s可用镜像 » 2021-01-30 10:33:15
zhang235hai wrote:
raspberryman wrote:
uboot驱动以太网是要烧录吗?
首页» 全志 V3S/F1C100s/X3» V3s/S3/f1c100s通过USB启动Linux,并把SD NAND/TF卡挂载为U盘, 可以dd或Win32DiskImager任烧写
我把我编译得到的u-boot-sunxi-with-spl.bin替换晕哥的文件在线就能运行,但是还是不能识别以太网
Allwinner S3 uboot 2020.01 (开机Logo + LCD + 以太网 + SDC 2)
http://whycan.com/t_3865.html
(出处:哇酷开发者社区)
#85 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » Ubuntu Framebuffer 编译运行 LittleVGL » 2021-01-30 08:46:31
搞定, 感谢楼主!
以下两个都是Ubuntu LVGL Framebuffer移植:
本站下载: lv_port_linux_frame_buffer.tgz (lvgl7.0) (70M)
本站下载: lv_linux_frame_buffer_v6.tgz (lvgl6.0) (30M)
#86 DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请问停车场摄像头抬杠程序一般与服务器是不是mqtt通讯吗? » 2021-01-28 14:07:42
#87 Re: 全志 SOC » 开源用荔枝派zero核心板做的双屏产品 » 2021-01-28 11:35:19
#88 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » Management Component Transport Protocol(MCTP)学习资源 » 2021-01-28 11:04:27
#89 Re: 全志 SOC » 开源用荔枝派zero核心板做的双屏产品 » 2021-01-28 10:45:44


#90 Re: 全志 SOC » 开源用荔枝派zero核心板做的双屏产品 » 2021-01-28 10:07:13
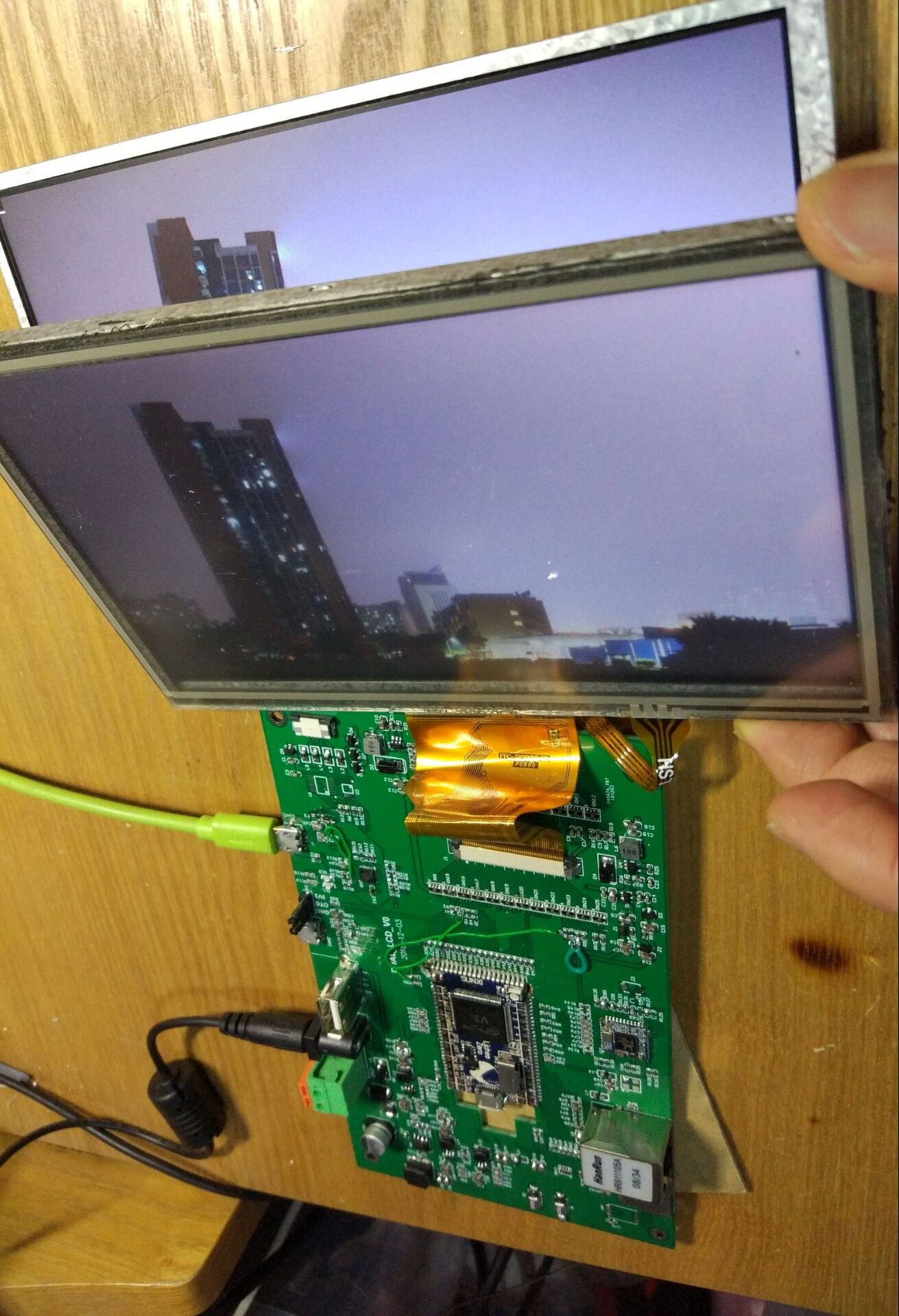
#91 全志 SOC » 开源用荔枝派zero核心板做的双屏产品 » 2021-01-28 10:04:12
- 奔跑的孩子
- 回复: 9
AD/DXP格式: V3s_Dual_LCD_20210128.7z
PCB有坑,LCD座子那里要扣掉一点
PCB有坑,LCD座子那里要扣掉一点
PCB有坑,LCD座子那里要扣掉一点
两个屏显示一毛一样的内容,估计是食堂售饭机用的。
顺便求下载权限
捂脸.gif
页次: 1
- 首页
- » 搜索
- » 奔跑的孩子 发表的帖子
东莞哇酷科技有限公司开发