- 首页
- » 搜索
- » sea18c 发表的帖子
#1 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 分享 Dell F495E-S0 495W 服务器电源 脱机启动 » 2022-09-09 13:44:33


#2 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 闲鱼收银机,让我来做个总结【很多很多图警告,建议用WIFI,流量劝退】 » 2022-05-07 15:42:53
#3 Re: 君正Ingenic/X1000/X2000/T10/T20/T30 » 感谢深圳网友 @Tony 友情赠送的 eMMC 转 TF 卡, 发现川宇的USB读卡器(可能是realtek螃蟹方案)不能识别,绿联可以识别 » 2022-03-24 10:49:16
#4 Re: 全志 SOC » A33 EMMC启动问题 » 2021-08-16 22:50:02
#7 Re: 全志 SOC » 发现全志上线了官方的淘宝店 » 2021-05-27 22:01:37
#9 Re: 全志 SOC » Debian 9.9 (stretch) 文件系统制作 » 2021-04-14 23:34:21
#10 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 某宝买的海思Hi3751的全套资料,希望有大佬能做出来 » 2021-03-04 08:13:56
#11 Re: 全志 SOC » 全志v3s板 (开源) » 2021-03-02 08:49:24
#12 Re: 全志 SOC » F1C100S Melis编程手册 » 2021-02-26 11:41:29
#16 Re: SigmaStar/SSD201/SSD202/SSD212 » 转自Q群的 SSD201/SSD202/SSD20X AD/DXP 原理图与PCB » 2021-02-11 23:42:24
#17 Re: 全志 SOC » f1c100s的uboot添加以下选项内核启动不了? » 2021-02-10 00:35:41
#18 Re: 好钜润半导体(TIKY) » TKM32F499开坑 » 2021-02-09 10:22:49
#19 Re: 全志 SOC » A33主线Linux跑起OpenGL/ES » 2021-02-06 15:22:52
#20 Re: 全志 SOC » A33主线Linux跑起OpenGL/ES » 2021-02-06 15:21:41
#22 全志 SOC » 全志A33的UART0 由 PB0 PB1 转到 PF2 PF4 失败,求助!!! » 2021-02-01 00:26:11
- sea18c
- 回复: 3

现在在uboot2020.10中想使用UART0 的PF2 PF4做串口,但由于些管脚与TF共用。
当勾选 ARM architecture -> [ *] UART0 on MicroSD breakout board 后会出现“board/sunxi/board.c:581:对‘sunxi_mmc_init’未定义的引用”的错误;
如果去掉MMC模块则能正常启动。
但现在我同时想用MMC功能,MMC模块勾选,然后把u-boot-2020.10/drivers/mmc/Kconfig文件中的&& !UART0_PORT_F去掉,编译正常,下载的芯片上运行则出现如上图的结果。
请问怎么改才能正常使用呢?
#25 VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 通过kpartx方式挂载raw格式镜像(转载) » 2021-01-11 22:15:41
- sea18c
- 回复: 0
转自https://blog.csdn.net/cnyyx/article/details/27182833
一、挂载镜像
1、losetup -f #查看哪个loop设备是空闲的
/dev/loop0 #loop0这个设备是空闲的
2、losetup /dev/loop0 /var/lib/libvirt/images/ubuntu.img
3、kpartx -av /dev/loop0
#输出结果如下
add map loop0p1 (253:0): 0 18380800 linear /dev/loop0 2048
add map loop0p2 (253:1): 0 2 linear /dev/loop0 18384894
add map loop0p5 (253:2): 0 2093056 linear /dev/loop0 18384896
4、mkdir /vmdisk
5、mount /dev/mapper/loop0p1 /vmdisk/ #把第一个分区挂载到/vmdisk
这样就可以查看和编辑镜像中的内容了
二、卸载镜像
1、umount /vmdisk
2、kpartx -dv /dev/loop0
#输出如下
del devmap : loop0p5
del devmap : loop0p2
del devmap : loop0p1
3、losetup -d /dev/loop0
注意:使用这个方式只能挂载raw格式镜像,不能处理qcow2格式镜像
如要处理qcow2格式镜像,需要使用qemu-ndb或者guestfs
#26 Re: 全志 SOC » [慢更]小白探索如何使用V3s播放音乐 » 2021-01-04 19:53:31
#27 Re: 全志 SOC » 新作F1C200S,打算百分之百开源,给大家的新年礼物。 » 2021-01-04 19:51:26
#29 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-12-18 00:38:11
#30 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-12-15 00:07:56
流氓兔 wrote:
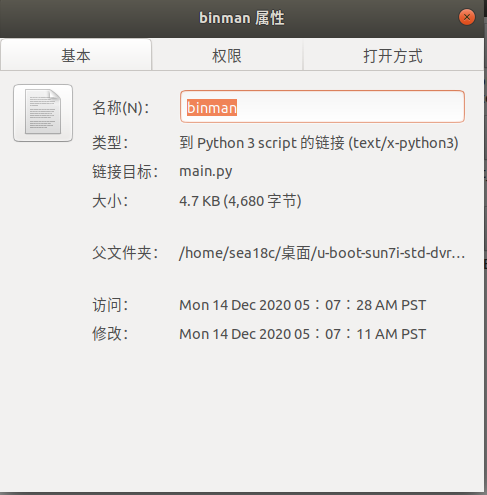
tools/binman/binman 依赖 python2
#!/usr/bin/env python2 # Copyright (c) 2016 Google, Inc # Written by Simon Glass <sjg@chromium.org> # # SPDX-License-Identifier: GPL-2.0+ # # Creates binary images from input files controlled by a description # """See README for more information""" import os import sys import traceback import unittest检查你的电脑 python2 能不能运行?
新的是依赖python3了
#31 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-12-15 00:02:22
#32 Re: 全志 SOC » 终于搞好了荔枝派nano linux uboot瘦身 + usb gadget hid + gt911触控 + littlevgl demo » 2020-12-14 23:37:01
hzpyl wrote:
编译本帖的 u-boot-lichee
进行可视化配置 make ARCH=arm menuconfig OK
编译 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- -j8 报警如下:
/files/members/1815/binman.jpg
./tools/binman/binman: binman.py 文件夹下存在这个文件,难道是内部程序错误?
/files/members/1815/binmanFile.jpg
你的这个错误是怎么解决的呢?
#33 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-12-14 22:42:06
我编译u-boot时出现以下错误,请ssp97帮看看是什么问题:
OBJCOPY spl/u-boot-spl-nodtb.bin
SYM spl/u-boot-spl.sym
COPY spl/u-boot-spl.bin
MKSUNXI spl/sunxi-spl.bin
BINMAN all
/bin/sh: 1: ./tools/binman/binman: Permission denied
Makefile:1024: recipe for target 'all' failed
make: *** [all] Error 126 当我把binman改为可执行文件时又了出现以下错误
OBJCOPY spl/u-boot-spl-nodtb.bin
SYM spl/u-boot-spl.sym
COPY spl/u-boot-spl.bin
MKSUNXI spl/sunxi-spl.bin
BINMAN all
./tools/binman/binman: 1: ./tools/binman/binman: main.py: not found
Makefile:1024: recipe for target 'all' failed
make: *** [all] Error 127那是怎么解决这个错误呢?
#35 Re: 全志 SOC » 抽空画了一个RGB40PIN接口转VGA接口模块的板子,再也不用到处找40pin的液晶屏啦,直接拿电脑显示器调试,PCB工程分享给大家 » 2020-12-10 21:27:09
#38 Re: 全志 SOC » DKTool F1C100s F1C200s专用工具 windows烧录调试软件,集成zadig putty win32diskimager » 2020-12-10 20:49:29
#40 Re: 全志 SOC » 全志A33 fex 提取思路 » 2020-11-26 12:52:43
#41 Re: 全志 SOC » f1c100s 官方bsp没有整合 电阻触摸屏(RTP)驱动, 现在在主线Linux上面找到驱动了 » 2020-11-15 22:23:03
mcd12 wrote:
你好。 谢谢,请输入代码或链接。 谢谢 sea18c.
https://gitee.com/xboot/xboot/blob/master/src/arch/arm32/mach-f1c100s/driver/ts-f1c100s.c
#43 Re: 全志 SOC » 连续多个晚上熬夜,终于搞定F1C100S裸奔(从SPI Flash启动) » 2020-11-12 10:25:09
jynjynjyn wrote:
kingmooth wrote:
感谢达克罗德提供的代码,我在这基础上已移植到KEIL上了,可以用JLINE DEBUG。
可以分享下具体的移植过程吗?
#44 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-11-02 01:19:01
#45 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-11-01 22:51:53
#46 Re: 全志 SOC » 闲鱼30元广告机板填坑主线uboot+主线linux » 2020-10-30 21:21:16
#47 Re: 全志 SOC » F1C100S裸跑实现硬件多图层叠加和Alpha » 2020-10-27 09:59:03
#48 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 这种数码管字体 littlevgl / lvgl 计时器/倒计时器 界面如何? » 2020-10-25 20:51:31
#49 Re: 全志 SOC » F1C100S裸跑实现硬件多图层叠加和Alpha » 2020-10-22 23:55:22
#51 Re: 全志 SOC » 芯灵思SIN-V3s光盘资料,谁能再分享一下?谢谢 » 2020-10-15 16:36:54
#52 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 关于Ubuntu 18.04下编译 SSD202D(卖家给的SDK)的文件无法通过uboot更新到nand上的问题 » 2020-10-15 16:32:08
#57 Re: DOPI开源摄像头(HI3516/HI3518) » hi3518学习资料分享 » 2020-10-01 10:11:58
#58 Re: DOPI开源摄像头(HI3516/HI3518) » hi3518学习资料分享 » 2020-09-27 23:56:08
#59 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请问 rgb lcd串这个74lv245是为了什么? » 2020-09-19 17:27:49
#60 Re: ST/STM8/STM8S/STM8L » 开源一个LED灯调光源码 » 2020-09-19 17:25:30
#65 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LvglFontTool字体工具更新V0.4版本 » 2020-08-15 10:22:24
#66 Re: 全志 SOC » F1C200S-PDA 硬件原理分析 » 2020-08-15 10:21:04
#67 Re: 全志 SOC » F1C100s 编译 XBOOT 详细过程 » 2020-08-14 16:25:01
an99h wrote:
_ _
_ _ | |___ _____ _____ _| |_
\ \/ /| _ | _ | _ |_ _| (C) 2007-2020
) ( | |_| | |_| | |_| | | |____JIANJUN.JIANG__
/_/\_\|_____|_____|_____| |_____________________|
V3.0.0 (Jul 25 2020 - 10:26:47) - [sast-kk131][SAST KK131 Digital Player Based On Allwinner F1C100S]不管在DRAM运行还是烧写到flash里,都卡在这里
这是GCC编译器有问题,换官方那个版本就可以了。
https://pan.baidu.com/s/1dDtssIt#list/path=%2F
xboot-toolchains->gcc-linaro-5.3.1-2016.05 ->gcc-linaro-5.3.1-2016.05-x86_64_arm-eabi.tar.xz
#70 Re: 全志 SOC » DIY一个全志H3的核心板,开贴记录一下 » 2020-07-11 11:11:37
#71 Re: 全志 SOC » f1c100s/f1c200s尝试从0开始使用主线uboot » 2020-06-23 08:25:52
#73 Re: DOPI开源摄像头(HI3516/HI3518) » DOPI编译 » 2020-06-10 15:34:25
#74 DOPI开源摄像头(HI3516/HI3518) » 记录下HI3516编译过程 » 2020-06-09 10:19:52
- sea18c
- 回复: 0
海思SDK软件包Hi3516EV200_SDK_V5.0.1.0编译
相关文件链接如下或者登录晕哥的百度VIP网盘,网盘内的3516文件夹下载
链接:https://pan.baidu.com/s/1_6gdohNCJKXm1TsDZ5hOkQ
提取码:mdo2
Hi3516EV200_SDK_V5.0.1.0.tgz在Hi3516EV200R002C05SPC010.rar > 01.software > board >
一、arm-himix100-linux 安装交叉编译工具链
安装步骤
拷贝。将arm-himix100-linux.tgz拷贝到Linux服务器上。
解压。解压文件,使用命令:
tar zxvf arm-himix100-linux.tgz –C ~/ #解压到~/目录
如果过程中没有提示信息,请等待命令执行完毕。
安装。解压完成后,进入arm-himix100-linux目录,
1、cd arm-himix100-linux
2、sudo apt-get install zlib1g-dev liblzo2-dev uuid-dev pkg-config lib32z1-dev #安装软件包
3、sudo ./arm-himix100-linux.install
4、source /etc/profile使环境变量生效
5、执行arm-himix100-linux-gcc -v
最好注销重新登录系统,不然重新打开终端会不成功
二、SDK软件包编译
拷贝。将Hi3516EV200_SDK_V5.0.1.0.tgz拷贝到Linux服务器上。
解压。解压文件,使用命令:
tar zxvf Hi3516EV200_SDK_V5.0.1.0.tgz –C ~/ #解压到~/目录
1、cd Hi3516EV200_SDK_V5.0.1.0
2、sudo ./sdk.unpack
这里会碰到一个问题./sdk.unpack: 2: ./sdk.unpack: source: not found
因为Ubuntu默认的脚本编辑器为sh,解压脚本用的dash,修改一下就行了
运行以下命令:
3、sudo dpkg-reconfigure dash
选择NO
再运行一遍./sdk.unpack就可以了
最终会解压出来四个文件夹drv mpp osal osdrv
drv:驱动模块
mpp:流媒体相关
osal:这个是新的,还没研究
osdrv:开源系统,包括工具链和内核文件系统
4、cd osdrv
5、make all
最后看到------- osdrv build done -------
#75 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 谁有emwin的arm9 gcc linux版本的静态库? » 2020-06-05 20:22:28
#76 Re: NB-IoT/2G模块/4G模块/GPRS模块/GPS/北斗 » 求助贴(转载CSDN博客) RDA8910 CSDK二次开发入门教程中的附件下载。 » 2020-06-02 16:45:27
#77 NB-IoT/2G模块/4G模块/GPRS模块/GPS/北斗 » 求助贴(转载CSDN博客) RDA8910 CSDK二次开发入门教程中的附件下载。 » 2020-06-02 15:59:20
- sea18c
- 回复: 9
看到晕哥在5月21就已转载了,但无奈CSDN积分不够,只能救助各路大神帮忙下载。
Windows10 USB驱动下载:
https://download.csdn.net/download/weixin_44570083/12438107
coolwatch_win32_R2.0.0002(调试软件):
https://download.csdn.net/download/weixin_44570083/12438131
UpgradeDownload_R23.0.0001(下载软件):
https://download.csdn.net/download/weixin_44570083/12438137
#79 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 求版主开放下载权限 » 2020-05-27 16:19:29
#82 Re: DOPI开源摄像头(HI3516/HI3518) » 感谢 dopi [行动派] 张总友情赠送的 海思超高性价比高颜值 HI3516EV200 开发板, 预售价59元 Q群 735884031 » 2020-05-17 22:50:38
#83 Re: 全志 SOC » 分享一个tinalinux源码仓库 » 2020-05-11 16:07:07
#87 Re: Cortex M0/M3/M4/M7 » stm32f407用引导升级挖坑跳坑 » 2020-05-11 12:48:35
#88 Re: 全志 SOC » 自己画了一个全志H3 H5核心板 24X32mm BTB连接器 » 2020-05-06 11:34:17
#90 Re: 全志 SOC » 自制F1C200S小板到手了,祝我幸福吧! » 2020-04-28 13:48:12
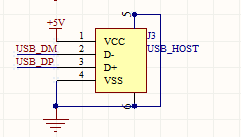
#91 Re: 全志 SOC » 请教F1C100S的 USB Host的kernel配置 » 2020-04-26 08:42:12
#92 Re: 全志 SOC » 搞定NS2009驱动 校准后没有大幅度的跳点 » 2020-04-23 11:12:45
#93 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 打造 HI3518 摄像头从入门到放弃最强帖 » 2020-04-22 21:54:16
#96 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 新人水一帖 » 2020-04-19 08:56:49
#97 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 10元一个全新720P互联网网关监控摄像头 HI3518 » 2020-04-15 23:24:26
#98 Re: 全志 SOC » Q群看到的这个翻跟斗机器人如何? » 2020-04-11 08:47:59
#102 Re: 全志 SOC » go语言开发f1c100s之oled驱动 » 2020-04-04 19:18:33
#103 Re: 全志 SOC » F1C100S下LittleVgl+RTT触摸、GT911、看门狗踩坑记录 » 2020-04-04 19:08:44
ap321 wrote:
是的 ,除了 链接文件不一样 还在启动文件头部添加
b system_vectors .long 0xaa55aa55 .long 0 .long image_size标识了 ,直接copy 链接文件 和在启动文件中添加标识 就可以使用在主线RTT上了
你再参考 https://whycan.cn/t_3958.html 这个,他直接合并了启动与APP的bin文件,他给的源程序在linux下你要修改几个bug就可以用了
#105 Re: 全志 SOC » Allwinner S3 uboot 2020.01 (LCD + 以太网 + USB 挂载 + FastBoot + SDC 2) 不开源 » 2020-04-03 16:26:57
#108 Re: 全志 SOC » F1c100s逆向了一下melis的TVD.DRV » 2020-03-31 15:19:34
#109 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 【水帖警告】Linux内核(以及其它各种源)在北京有镜像了 » 2020-03-30 23:00:51
#112 Re: 全志 SOC » EA3036芯片老烧大家帮我分析下。。 » 2020-03-30 13:42:07
#116 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 全新 7寸京东方 IPS 1024*600完美屏+AM3354 CPU运行Android 39.9元 只有20台(已售完,下次要趁早^_^) » 2020-03-27 16:00:56
#117 Re: 全志 SOC » f1c100s运行xboot的疑问 » 2020-03-27 15:59:47
#119 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » AIR724模块, 合宙拼团: 一个4G模块+一个4G开发板 = 19.9元 » 2020-03-27 15:44:25
#121 Re: 全志 SOC » 自制F1C100S核心板 (开源PCB) » 2020-03-24 19:20:05
#122 Re: 全志 SOC » 试试F1C100s的硬件游标HWC » 2020-03-21 08:23:10
#123 Re: 全志 SOC » v3s现在有办法通过jlink单步裸奔么? » 2020-03-19 21:54:24
#125 Re: 全志 SOC » DIY一块全志V3S的学习板,尽量引出所有功能(感谢晕哥支持) » 2020-03-14 09:52:35
#126 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 以前的一点IPTV 机顶盒的资料,不止哪里收的,传上来大家看看 » 2020-03-10 09:34:28
#127 Re: 全志 SOC » DKTool工具BUG提交汇总 » 2020-03-10 09:08:25
#128 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 研究了下Tslib内关于触摸屏校准的算法,水一贴 » 2020-03-10 09:05:21
#130 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 研究了下Tslib内关于触摸屏校准的算法,水一贴 » 2020-03-08 23:14:16
#131 Re: 全志 SOC » 荔枝派V3S lichee_zero-new » 2020-03-08 23:07:43
#132 Re: 全志 SOC » F1C100 LittlevGL GUI » 2020-03-08 23:04:56
#133 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » xynth----早些年很感兴趣的一个gui » 2020-03-07 08:33:34
#134 Re: 全志 SOC » DIY一块全志V3S的学习板,尽量引出所有功能(感谢晕哥支持) » 2020-03-06 16:41:50
#135 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 正在大刀阔斧地改革uC/GUI,大家给提点意见。 » 2020-03-05 15:51:41
#137 Re: RISC-V » 晒下第二批BITK210的PCB,尺寸已优化 » 2020-03-05 15:41:45
#140 Re: 全志 SOC » 硬坑,F1C200S模块化可扩展手持机 » 2020-03-01 21:02:04
#141 Re: 全志 SOC » 硬坑,F1C200S模块化可扩展手持机 » 2020-03-01 11:59:08
#142 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 请问下littlevgl 怎么检测键盘输入? » 2020-02-29 23:27:48
#144 Re: 全志 SOC » DKTool工具BUG提交汇总 » 2020-02-29 11:23:56
#146 Re: 全志 SOC » 跟风画了个F1C200S的小板 【开源PCB】 » 2020-02-28 23:48:21
#149 Re: 全志 SOC » Lichee Pi Zero 网口导致内存泄漏问题 » 2020-02-28 15:22:37
#151 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 发现 "速递易" 快递柜是我用过最好的触摸屏, 用指甲或者手指皮肤轻轻触碰都可以触发, 而且不会有误触,请问是用什么技术? » 2020-02-28 15:19:52
#154 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 从淘宝网购买时要小心 » 2020-02-28 15:14:39
#156 Re: 8051/STC8/AT89C51/N76E003 » 晒一下CH558跑的CMSIS-DAP v2调试器,下载速度可以达到70KB/s(Flash)和300KB/s(SRAM) » 2020-02-27 23:33:14
#157 Re: ESP32/ESP8266 » I2S信号正确的标准是什么? » 2020-02-26 15:41:45
#159 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-26 09:04:28
#160 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-26 09:02:35
#161 Re: 全志 SOC » LittlevGL卡死 » 2020-02-26 08:59:46
#162 Re: 全志 SOC » LittlevGL卡死 » 2020-02-25 23:12:03
#163 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-24 18:04:17
#164 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-24 11:23:24
#165 Re: 全志 SOC » DKTool工具BUG提交汇总 » 2020-02-24 09:32:16
#166 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-24 09:30:35
#167 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-23 22:43:08
#168 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-23 22:31:55
#169 Re: 全志 SOC » DKTool工具BUG提交汇总 » 2020-02-23 22:21:17
#170 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-21 13:05:41
#171 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-21 12:22:17
Blueskull wrote:
不想用LGPL,因为我要静态链接。我做的BSP是开源的,但是我的最终应用是闭源的。
另外,AWTK太强大了,很多功能我用不到。我只需要基本的显示和控件。AWTK的一大堆底层库我都用不到。
AWTK更像wx或者Qt,我需要的是类似MiniGUI的东西。
关于输入法和中文支持,这些我都没有需求。能显示ASCII,能支持常见触控控件,我就OK了。
不用普通单片机的唯一理由就是我想刷新到30fps/60fps,常见的IL系列芯片SPI频率最大10M/15M,可超到30M。
30M串口没法支持32024016*30,何况还得考虑过扫描和其他协议损耗。
那也是,功能多也不一定是最好的,适合自己的才是最好的,lvgl我移植好了到xboot,但对xboot不熟悉,下一步都不知怎么进行了。后面可以请教你xboot相关问题吗?
#172 Re: 全志 SOC » F1C200S入坑手记 » 2020-02-21 10:14:31
#173 Re: 全志 SOC » 跟风画了个F1C200S的小板 【开源PCB】 » 2020-02-20 11:02:39
#174 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 为谈快递合作,紧急赠送,DIY金属盒子,含全新亚克力!12元包邮送电流表线!真实! 赠品不用拍,但是需要备注 哇酷送线包邮 » 2020-02-13 10:28:31
#175 Re: Nuvoton N32905/N32926/NUC972/N9H20/N9H26/N9H30 » 网友 @19697805 作品 基于NUC972 的 FreeRTOS + emwin » 2020-02-11 16:58:55
#177 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » [原创开源]emwin导航界面支持Awesome图标字体 » 2020-02-11 15:55:49
#178 DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » xboot移植lvgl-6.1.1成功 » 2020-02-11 15:53:24
- sea18c
- 回复: 3
最近在xboot上移植了最新版的lvgl,把过程遇到的坑记录下:
先下载xboot源码
git clone https://github.com/xboot/xboot.git
下载完成后在/xboot/src/external/ 目录下新建lvgl-6.1.1目录;
在其目录下下载lvgl与lv_examples的源码:
git clone https://github.com/littlevgl/lvgl.git
git clone https://github.com/littlevgl/lv_examples.git
修改xboot/src/Makefile 文件,主要是添加交叉编译与添加lvgl文件路径,详见源代码;
把/xboot/src/external/lvgl-6.1.1/lvgl/下的lv_conf_template.h文件复制到/xboot/src/external/ lvgl-6.1.1/目录下并改名为lv_conf.h;
把/xboot/src/external/lvgl-6.1.1/lv_examples/下的lv_ex_conf_templ.h文件复制到/xboot/src/external/ lvgl-6.1.1/目录下并改名为lv_ex_conf.h;
设置详见源代码或直接复制源代码里的两个文件即可;
此时还有一个地方要修改,由于lvgl6.1.1版的LV_COLOR_DEPTH有1、8、16、32,默认是16 与xboot显示器使用有问题,需更改为32;
/xboot/src/external/lvgl-6.1.1/lvgl/src/lv_conf_checker.h 这个文件里面修改;
Lvgl的demo与驱动初始化相关程序详见/xboot/src/kernel/command/cmd-test.c。
源码编译后运行/xboot/tools/qemu-system/linux/ realview-run.sh 脚本,然后在shell输入test 回车即可以在显示屏看到lvgl的demo,本demo只加入了mouse输入,操作鼠标会在shell看到坐标输出。
注意:用鼠标操作时一开始坐标是不准的,需把鼠标移出虚拟机屏幕的右下角,多移几下后再移回屏幕,放到要点击的地方一两次再操作即可。
附件下载地址:configs_tar.gz
#179 Re: 全志 SOC » A33主线Linux跑起OpenGL/ES » 2020-02-09 14:57:12
#180 Re: 全志 SOC » 尝试从零构建F1C100s开发环境 » 2020-02-08 09:40:02
#182 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 灾年给万用表DIY一块续命电池, 快递停了挺不方便的, 凑合用吧 » 2020-02-08 09:30:16
#184 Re: 全志 SOC » lvgl移植到裸跑的f1c100s上 » 2020-02-07 15:54:33
#185 Re: Php/Nodejs/Web/HTML5/Javascript/微信开发/Python » 微软基于新版edge浏览器体验还真不错, 基于google开源chromium内核,真是应验那句老话----打不过你就加入你! » 2020-02-07 15:50:22
#187 Re: 全志 SOC » f1c100s使用uart1 » 2020-02-07 15:39:04
#189 Re: 全志 SOC » 【花屏问题】主线Uboot启动显示LOGO,加载内核时候出现1S花屏问题!如何平滑过渡?请问各位大神如何解决?附上测试视频 » 2020-02-05 22:59:02
#191 Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » vs code 仿真调试xboot的arm32-realview平台程序 » 2020-02-05 22:52:10
- sea18c
- 回复: 2
先下载xboot程序,在src下的Makefile文件里修改
CROSS_COMPILE ?=arm-linux-gnueabihf-
PLATFORM ?= arm32-realview
用vs code 打开xboot文件夹,按F5 选择C++(GDB/LLDB),弹出launch.json复制以下内容替换,
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "xboot debug ", // 配置名称,将会在启动配置的下拉菜单中显示
"type": "cppdbg", // 配置类型,这里只能为cppdbg
"request": "launch", // 请求配置类型,可以为launch(启动)或attach(附加)
"program": "/home/sea18c/xboot/output/xboot", // 将要进行调试的程序的路径
"args": [],
"stopAtEntry": true, // 设为true时程序将暂停在程序入口处,我一般设置为true
"cwd": "${workspaceFolder}", // 调试程序时的工作目录
"environment": [], // (环境变量?)
"externalConsole": false, // 调试时是否显示控制台窗口,一般设置为true显示控制台,或者false用本软件控制台
"linux": { //特定于 Linux 的启动配置属性。
"MIMode": "gdb", //指示midebugengine将连接到的控制台调试器。允许值为“gdb”“lldb”。
"miDebuggerPath": "/usr/local/arm/gcc-linaro-5.3.1-2016.05-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gdb",//调试器的路径。
},
"miDebuggerServerAddress": "localhost:10000",//要连接到的调试器服务器的网络地址(例如:localhost:1234)。
}
]
}
其中
"program" 为调试的路径;
"miDebuggerPath"为调试器的路径;
"miDebuggerServerAddress"为调试器服务器的网络地址。
然后在终端运行./tools/qemu-system/linux/realview-dbg.sh后再按F5即可单步调试。
#193 Re: 全志 SOC » lvgl移植到裸跑的f1c100s上 » 2020-02-05 11:36:13
#195 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 搜了一圈, 还是没找到50PIN RGB TTL 液晶接口转 40PIN LVDS 接口转换板 » 2020-01-31 13:11:17
#196 Re: 全志 SOC » 求助:A33主线uboot跑起来了,但是无法从 eMMC 启动 » 2020-01-30 18:45:15
- 首页
- » 搜索
- » sea18c 发表的帖子
东莞哇酷科技有限公司开发