- 首页
- » 搜索
- » ubuntu 发表的帖子
#1 Re: 全志 SOC » 全志D1-H DDR问题 » 2026-05-17 15:35:15
#2 Re: 全志 SOC » 全志D1-H DDR问题 » 2026-05-17 15:34:30
#3 Re: 全志 SOC » R128 SDK 有人可以提供吗 » 2026-04-29 16:05:47
#5 Re: 华芯微特 » SWM32SRET6 停产? » 2026-04-21 15:45:11
#6 Re: 全志 SOC » T113S3如何实现视频图层与UI图层叠加 » 2026-03-31 08:56:59
ubuntu wrote:
@树莓学LINUX
对,cat /dev/zero > /dev/fb0 就可以把 UI层全部穿透了,原理类似弄就行。
LVGL视频播放界面实现方法
https://whycan.com/t_9283.html
#7 Re: 全志 SOC » D1S(T133-B)能播放1080P的视频吗? » 2026-03-31 08:55:20
#8 Re: 全志 SOC » T113S3如何实现视频图层与UI图层叠加 » 2026-03-31 08:54:27
#9 Re: 全志 SOC » 全志T113启动信息 sunxi-rtc 7090000.rtc: Warning: Using internal RC 16M clock » 2026-01-16 11:53:16
#10 全志 SOC » evtest 测试两个 T113固件,红外遥控器配置有差异 » 2026-01-09 13:33:42
- ubuntu
- 回复: 0
root@TinaLinux:/#
root@TinaLinux:/# evtest /dev/input/event0
Input driver version is 1.0.1
Input device ID: bus 0x19 vendor 0x1 product 0x1 version 0x100
Input device name: "sunxi_ir_recv"
Supported events:
Event type 0 (EV_SYN)
Event type 1 (EV_KEY)
Event code 14 (KEY_BACKSPACE)
Event code 15 (KEY_TAB)
Event code 83 (KEY_KPDOT)
Event code 102 (KEY_HOME)
Event code 103 (KEY_UP)
Event code 105 (KEY_LEFT)
Event code 106 (KEY_RIGHT)
Event code 108 (KEY_DOWN)
Event code 113 (KEY_MUTE)
Event code 114 (KEY_VOLUMEDOWN)
Event code 115 (KEY_VOLUMEUP)
Event code 116 (KEY_POWER)
Event code 119 (KEY_PAUSE)
Event code 128 (KEY_STOP)
Event code 139 (KEY_MENU)
Event code 141 (KEY_SETUP)
Event code 158 (KEY_BACK)
Event code 163 (KEY_NEXTSONG)
Event code 164 (KEY_PLAYPAUSE)
Event code 165 (KEY_PREVIOUSSONG)
Event code 166 (KEY_STOPCD)
Event code 168 (KEY_REWIND)
Event code 207 (KEY_PLAY)
Event code 208 (KEY_FASTFORWARD)
Event code 256 (BTN_0)
Event code 352 (KEY_OK)
Event code 365 (KEY_EPG)
Event code 377 (KEY_TV)
Event code 402 (KEY_CHANNELUP)
Event code 403 (KEY_CHANNELDOWN)
Event code 407 (KEY_NEXT)
Event code 412 (KEY_PREVIOUS)
Event code 512 (KEY_NUMERIC_0)
Event code 513 (KEY_NUMERIC_1)
Event code 514 (KEY_NUMERIC_2)
Event code 515 (KEY_NUMERIC_3)
Event code 516 (KEY_NUMERIC_4)
Event code 517 (KEY_NUMERIC_5)
Event code 518 (KEY_NUMERIC_6)
Event code 519 (KEY_NUMERIC_7)
Event code 520 (KEY_NUMERIC_8)
Event code 521 (KEY_NUMERIC_9)
Event code 535 (KEY_CAMERA_UP)
Event code 536 (KEY_CAMERA_DOWN)
Event code 717 (BTN_TRIGGER_HAPPY14)
Event code 719 (BTN_TRIGGER_HAPPY16)
Event type 2 (EV_REL)
Event code 0 (REL_X)
Event code 1 (REL_Y)
Event type 4 (EV_MSC)
Event code 4 (MSC_SCAN)
Key repeat handling:
Repeat type 20 (EV_REP)
Repeat code 0 (REP_DELAY)
Value 500
Repeat code 1 (REP_PERIOD)
Value 125
Properties:
Property type 5 (INPUT_PROP_POINTING_STICK)
Testing ... (interrupt to exit)
Event: time 435.479741, type 4 (EV_MSC), code 4 (MSC_SCAN), value a8
Event: time 435.479741, -------------- SYN_REPORT ------------另外一块:
root@TinaLinux:/# evtest /dev//input/event0
Input driver version is 1.0.1
Input device ID: bus 0x19 vendor 0x1 product 0x1 version 0x100
Input device name: "sunxi_ir_recv"
Supported events:
Event type 0 (EV_SYN)
Event type 1 (EV_KEY)
Event code 102 (KEY_HOME)
Event code 103 (KEY_UP)
Event code 105 (KEY_LEFT)
Event code 106 (KEY_RIGHT)
Event code 108 (KEY_DOWN)
Event code 114 (KEY_VOLUMEDOWN)
Event code 115 (KEY_VOLUMEUP)
Event code 116 (KEY_POWER)
Event code 139 (KEY_MENU)
Event code 158 (KEY_BACK)
Event code 352 (KEY_OK)
Event code 535 (KEY_CAMERA_UP)
Event code 536 (KEY_CAMERA_DOWN)
Event type 2 (EV_REL)
Event code 0 (REL_X)
Event code 1 (REL_Y)
Event type 4 (EV_MSC)
Event code 4 (MSC_SCAN)
Key repeat handling:
Repeat type 20 (EV_REP)
Repeat code 0 (REP_DELAY)
Value 500
Repeat code 1 (REP_PERIOD)
Value 125
Properties:
Property type 5 (INPUT_PROP_POINTING_STICK)
Testing ... (interrupt to exit)#13 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 发现个好玩的东东:Flash ID伪造器 这个原理简单,但TB上好像没得卖 » 2025-10-30 15:51:23
#14 Re: 全志 SOC » 有把T113-s3用到工业应用的么 » 2025-10-27 18:40:40
这个是旧版手册,新版已经改了。
据说是一致性不行,有一定比例过不了低温。
#16 Re: 全志 SOC » 求教,f1c200s把系统搞炸了,使用xfel备份还原不开机 » 2025-10-19 23:37:34
#17 Re: 全志 SOC » 用T113-S4搭建一个8.8寸长条屏HMI开发平台 » 2025-10-14 09:46:17
#18 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 做了一块V821+摄像头的相机板子,想贴片。欢迎大家来帮忙讨论讨论这个板子怎么做出来合适 » 2025-10-11 09:09:31
#20 Re: 全志 SOC » 淘到的二手苹果 MAC AIR 安装 Windows » 2025-09-27 11:46:08
#21 Re: 全志 SOC » 淘到的二手苹果 MAC AIR 安装 Windows » 2025-09-27 10:44:20
#22 Re: 全志 SOC » 淘到的二手苹果 MAC AIR 安装 Windows » 2025-09-27 10:07:39
#23 Re: 全志 SOC » 淘到的二手苹果 MAC AIR 安装 Windows » 2025-09-27 09:41:17
MAC AIR 2011,型号A1369
① 下载 cn_windows_7_ultimate_with_sp1_x64_dvd_u_677408.iso
② 使用 ultraiso 刻录 iso 到U盘
③ 按住左边ALT按键,开机,选EFI即可进入U盘安装程序
④ 下载 BootCamp5.1.5621.zip 安装
⑤ 激活:打开powershell输入
irm https://get.activated.win | iex参考: https://www.bilibili.com/video/BV1eqbWzjEv6
⑥ 安装adb驱动
小米官网:xiaomi_usb_driver.rar
本站下载:xiaomi_usb_driver.rar
#24 全志 SOC » 淘到的二手苹果 MAC AIR 安装 Windows » 2025-09-26 21:04:43
- ubuntu
- 回复: 7
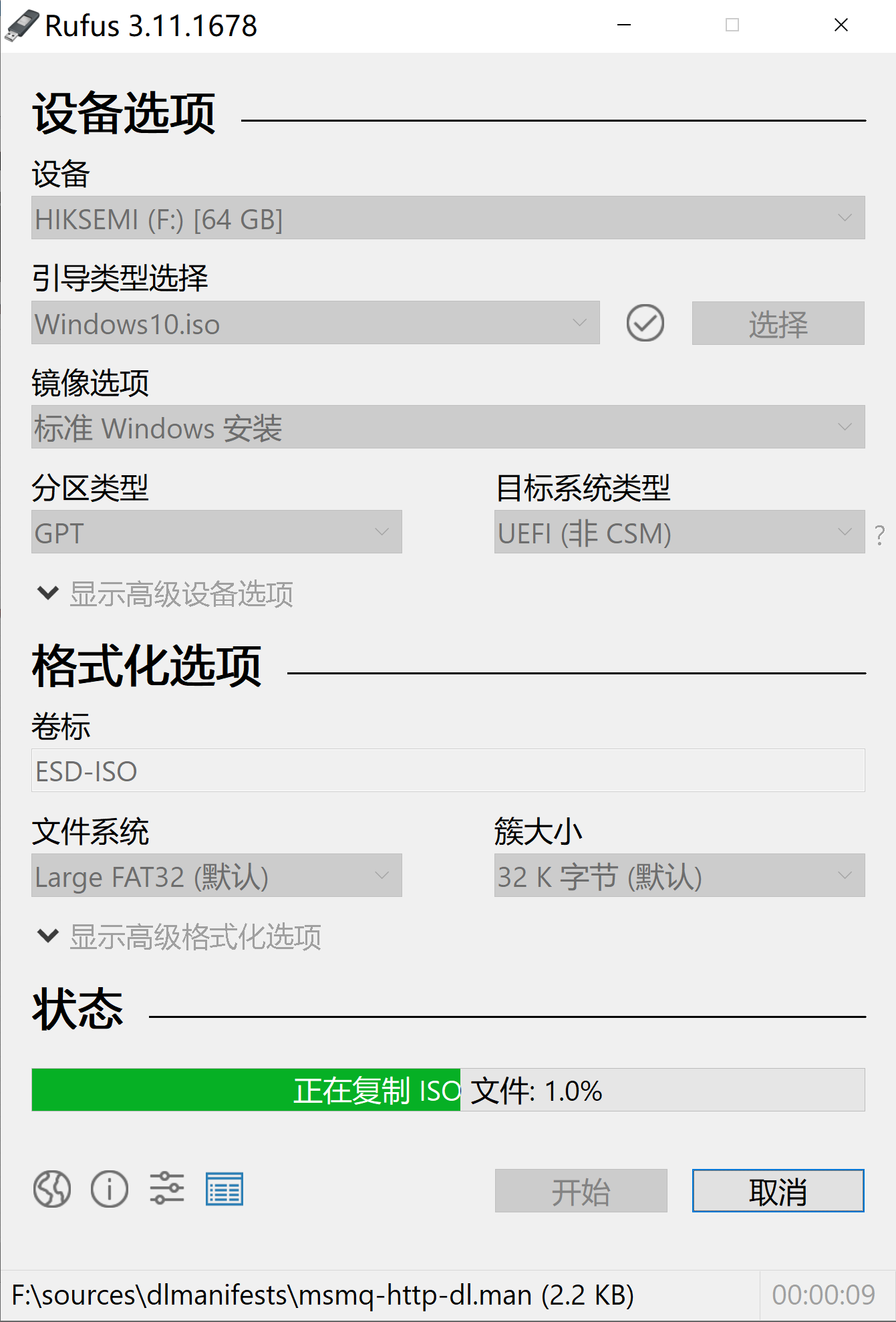
MAC AIR 2013,型号A1466
① 下载 MediaCreationTool_22H2.exe 生成 Windows10.iso
② 使用 Rufus 3.11.1678 刻录 Windows10.iso 到U盘
③ 按住左边ALT按键,开机,选EFI即可进入U盘安装程序
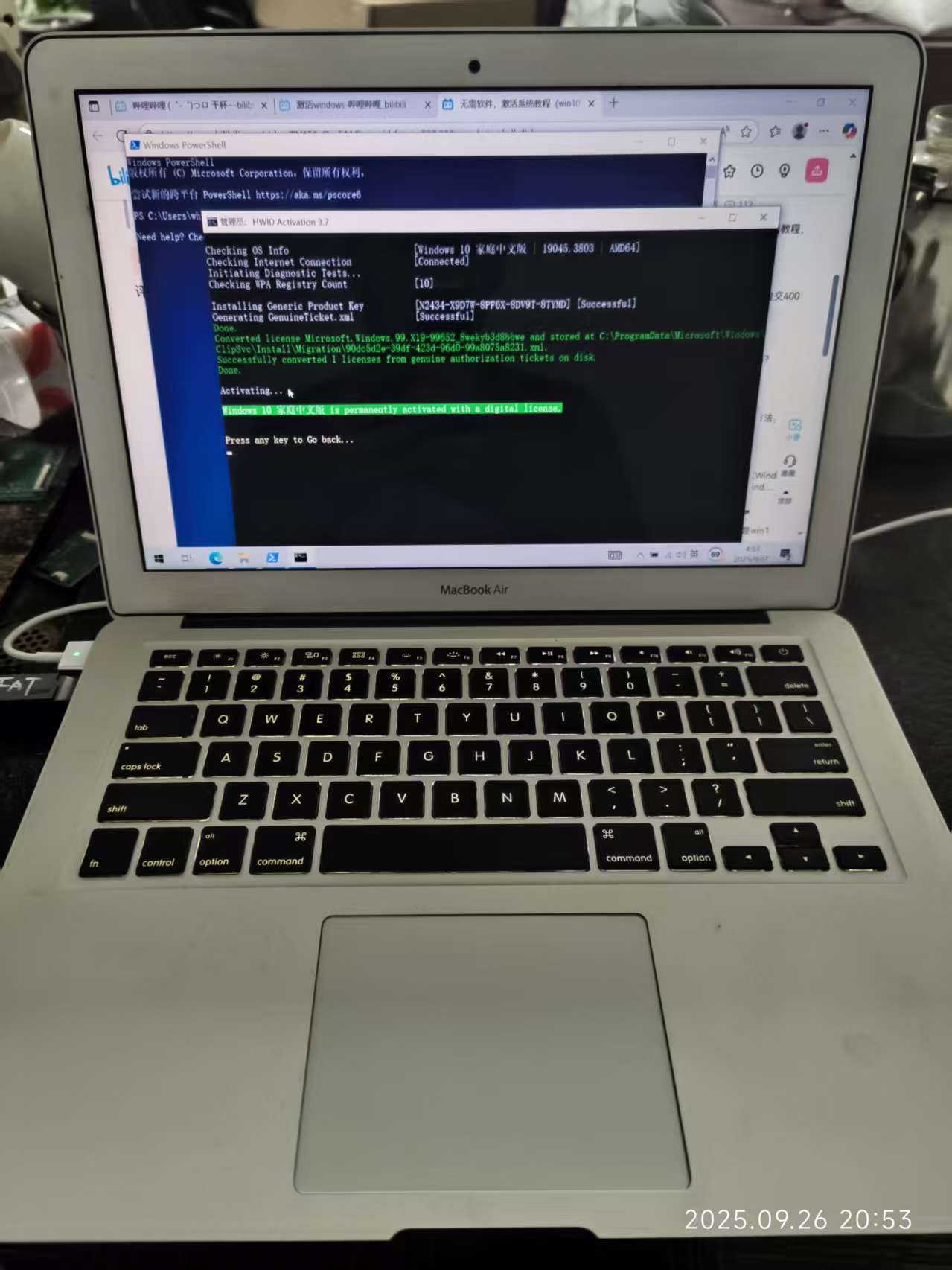
④ 下载 BootCamp 6.0.6136 安装
⑤ 激活:打开powershell输入
irm https://get.activated.win | iex参考: https://www.bilibili.com/video/BV1eqbWzjEv6
--------------------------------------
--------------------------------------
--------------------------------------
MAC Pro 2013版本 Windows10 安装 BootCamp 6.0.6136,提示 【这个bootcamp版本不适用此电脑机型】
有一个偏门方法,用管理员权限打开 powershell,
切换到 【BootCamp\Drivers\Apple】,
命令行执行 .\BootCamp.msi
然后就安装成功了!
#25 Re: 全志 SOC » SOC选型推荐 » 2025-09-26 11:53:01
#27 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 嵌入式工程师的职业瓶颈 » 2025-09-24 17:15:16
#29 全志 SOC » 发现全志新的SDK,原来的 /dev/ttySx 都改成了 /dev/ttyASx,这是为什么呢? » 2025-09-02 10:00:26
- ubuntu
- 回复: 2
发现全志新的SDK,原来的 /dev/ttySx 都改成了 /dev/ttyASx,这是为什么呢?
# ls /dev/tty*S? -l
crw-rw---- 1 root root 245, 1 Jan 1 23:07 /dev/ttyAS1
crw-rw---- 1 root root 245, 3 Jan 1 23:07 /dev/ttyAS3
crw-rw---- 1 root root 4, 64 Jan 1 00:00 /dev/ttyS0
crw-rw---- 1 root root 4, 65 Jan 1 00:00 /dev/ttyS1
crw-rw---- 1 root root 4, 66 Jan 1 00:00 /dev/ttyS2
crw-rw---- 1 root root 4, 67 Jan 1 00:00 /dev/ttyS3#30 Re: 全志 SOC » 昆仑的屏运行自己的QT程序 » 2025-08-26 13:33:14

#31 Re: 全志 SOC » 昆仑的屏运行自己的QT程序 » 2025-08-26 13:12:17
#32 Re: 全志 SOC » 昆仑的屏运行自己的QT程序 » 2025-08-26 12:51:51
#33 Re: 全志 SOC » 有偿寻找U盘音乐解码方案。。。 » 2025-08-08 19:49:04
#35 Re: 全志 SOC » R311的板子可以备份固件吗 » 2025-07-16 10:53:51
#36 全志 SOC » GD这三款NAND FLASH:GD5F1GQ4UAYIG GD5F1GQ4UBYIG GD5F1GQ4UCYIG 有什么区别呢? » 2025-07-08 11:49:17
#37 Re: 全志 SOC » F1C100S使用LVGL显示图片速度很慢,寻求优化建议 » 2025-07-07 18:04:49
#38 Re: 全志 SOC » 请问 AVR的 ATTINY10 这个单片机 可以用什么烧录? » 2025-06-22 15:03:01
#39 Re: 全志 SOC » T113-S3如何检测单片机是否正常运行 » 2025-06-21 11:13:35
#40 Re: 全志 SOC » 请问 AVR的 ATTINY10 这个单片机 可以用什么烧录? » 2025-06-21 10:32:54
#43 Re: 全志 SOC » A733烧录Android15后不能启动 » 2025-06-08 10:55:26
......
[464]HELLO! BOOT0 is starting!
[467]BOOT0 commit : {f11f8d34}
[473]PMU: AXP8191
[475]pmu_chip_id = 14
[477]set pll start
[479]cpul clk 0xf8802700!
[483]cpub clk 0xf8802700!
[486]dsu clk 0xf8801e00!
[489]set pll end
[491]dram return write ok
[494]board init ok
[495]rtc[3] value = 0xb00f
[498]rtc[7] value = 0x2
[500]enable_jtag
[502]Driver version 0.0.9 2024.11.20 10:19
[522]Cal words efuse addr 0x60 value 0xa8830000, addr 0x64 value 0x4f1f9b62
[579]Device up at:[581][RX, TX]: gear=[4, 4], lane[2, 2], pwr[FAST MODE, FAST MODE], rate = 2
[588]sc st 2
[590]Read blk size 4096,capacity 31240191
[594]DRAM BOOT DRIVE INFO: V0.581_optim_mode1
[600]DRAM_VCC set to 560 mv
[602]DRAM CLK =2400 MHZ
[605]DRAM Type =9 (8:LPDDR4,9:LPDDR5)
[703]Training result is = 7
[705]DRAM Pstate 1 training, frequency is 1200 Mhz
[808]Training result is = 7
[811]DRAM Pstate 2 training, frequency is 800 Mhz
[999]Training result is = 7
[1002]DRAM Pstate 3 training, frequency is 400 Mhz
[1055]Training result is = 7
[1058]DRAM Pstate 0 training, frequency is 2400 Mhz
[1067]Actual DRAM SIZE =4096 M
[1070]DRAM SIZE =4096 MBytes, para1 = a10a, para2 = 10000001, dram_tpr13 = 65
[1085]DRAM simple test OK.
[1088]dram size = 4096
[1126]Loading boot-pkg Succeed(index=0).
[1130]Entry_name = u-boot
[1139]Entry_name = monitor
[1143]Entry_name = scp
[1145]error: dtb not found for scp
[1150]Jump to ATF: monitor_base = 0x48000000, uboot_base = 0x4a000000, optee_base = 0x0
NOTICE: BL31: OP-TEE 32bit detected
NOTICE: BL31: U-BOOT 32bit detected
NOTICE: BL31: v2.5(debug):9f44f15ed
NOTICE: BL31: Built : 21:09:08, Dec 23 2024
NOTICE: hardware check error1
BACKTRACE: START: bl31_platform_setup
0: EL3: 0x48003e1c
1: EL3: 0x480041fc
2: EL3: 0x480040f8
3: EL3: 0x480001f0
BACKTRACE: END: bl31_platform_setup
PANIC in EL3.
x30 = 0x0000000048004208
x0 = 0x0000000002500000
x1 = 0x0000000000000060
x2 = 0x0000000000000060
x3 = 0x00000000ffffffc8
x4 = 0x0000000000000034
x5 = 0x0000000000000034
x6 = 0x0000000000000004
x7 = 0x0000000000000000
x8 = 0x000000023fffffff
x9 = 0x0000000048013000
x10 = 0x0000000000000000
x11 = 0x0000000048000000
x12 = 0x0000000000000000
x13 = 0x0000000000000000
x14 = 0x0000000000000000
x15 = 0x0000000000000000
x16 = 0x0000000000000000
x17 = 0x0000000000048c00
x18 = 0x0000000000000020
x19 = 0x000000004800f4b4
x20 = 0x0000000000000000
x21 = 0x0000000000001903
x22 = 0x0000000000000000
x23 = 0x0000000000000000
x24 = 0x0000000000000000
x25 = 0x0000000000000000
x26 = 0x0000000000000000
x27 = 0x0000000000000000
x28 = 0x0000000000000000
x29 = 0x00000000480142c0
scr_el3 = 0x0000000000000238
sctlr_el3 = 0x0000000030cd183f
cptr_el3 = 0x0000000000000000
tcr_el3 = 0x000000008081351e
daif = 0x00000000000002c0
mair_el3 = 0x00000000004404ff
spsr_el3 = 0x00000000000001cd
elr_el3 = 0x0000000000000000
ttbr0_el3 = 0x0000000048041301
esr_el3 = 0x00000000b21e3e3f
far_el3 = 0x72fefefffbffffbf
spsr_el1 = 0x00000000000001cd
elr_el1 = 0x0000000000000000
spsr_abt = 0x00000000e0067807
spsr_und = 0x00000000e20ef80c
spsr_irq = 0x00000000681478dc
spsr_fiq = 0x00000000c00a7c0e
sctlr_el1 = 0x0000000000c50838
actlr_el1 = 0x0000000000000000
cpacr_el1 = 0x0000000000000000
csselr_el1 = 0x0000000000000000
sp_el1 = 0x0000000000000000
esr_el1 = 0x000000007f7ffffe
ttbr0_el1 = 0x0000fefec4fe7efc
ttbr1_el1 = 0x00007efeff7f7ff8
mair_el1 = 0x44e048e000098aa4
amair_el1 = 0x0000000000000000
tcr_el1 = 0x0000000000000000
tpidr_el1 = 0xfffffe7f7ffefece
tpidr_el0 = 0xdffede76fefff7fe
tpidrro_el0 = 0xf7fefbffdffff6fe
par_el1 = 0xff00000048000980
mpidr_el1 = 0x0000000081000000
afsr0_el1 = 0x0000000000000000
afsr1_el1 = 0x0000000000000000
contextidr_el1 = 0x0000000000000000
vbar_el1 = 0x0000000000000000
cntp_ctl_el0 = 0x0000000000000000
cntp_cval_el0 = 0xfffffffffefefefc
cntv_ctl_el0 = 0x0000000000000000
cntv_cval_el0 = 0xfffeffffffffdeff
cntkctl_el1 = 0x0000000000000000
sp_el0 = 0x00000000480142c0
isr_el1 = 0x0000000000000000
cpuectlr_el1 = 0x000000002808bc00
icc_hppir0_el1 = 0x00000000000003ff
icc_hppir1_el1 = 0x00000000000003ff
icc_ctlr_el3 = 0x0000000000028400
gicd_ispendr regs (Offsets 0x200-0x278)
Offset Value
0x200: 0x0000000000000000
0x208: 0x0000000000000000
0x210: 0x0000000000000000
0x218: 0x0000000000000000
0x220: 0x0000000000000000
0x228: 0x0000000000000000
0x230: 0x0000000000000000
0x238: 0x0000000000000000
0x240: 0x0000000000000000
0x248: 0x0000000000000000
0x250: 0x0000000000000000
0x258: 0x0000000000000000
0x260: 0x0000000000000000
0x268: 0x0000000000000000
0x270: 0x0000000000000000
0x278: 0x0000000000000000我也出现了这个情况
#44 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请问这种 MT919C-00FF 36F-12646-F 红外发射芯片是哪里买的? » 2025-06-04 14:42:11
海石生风 wrote:
电路极其简单,引脚使用非常极限。LED驱动电流300mA以上
/files/members/1798/屏幕截图_20250507_092849-1.png
大佬,请问这个是什么单片机型号呢?
#46 Re: 全志 SOC » T113进入uboot0断电后下一次可能起不来问题 , » 2025-05-03 23:14:02
#47 Re: 全志 SOC » 请教F1C200S的RGB屏幕配置问题 » 2025-04-29 00:10:44
buildroot-tiny200 (F1C100/200s) 开发包近期更新内容 已支持DVP摄像头 ,支持SPI NAND
https://whycan.com/t_5221.html
#48 Re: 全志 SOC » 全志v3s 卡在uboot dram打印之后 » 2025-04-26 18:37:08
#50 Re: 全志 SOC » t113s3 读取CPU温度失败(已解决) » 2025-04-15 09:25:31
#51 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 拆了娃的故事机,发现电路板上元件不多啊。 » 2025-04-06 08:05:40
#52 Re: 全志 SOC » t113 qt g2d » 2025-04-01 23:59:16
#53 Re: 全志 SOC » 全志F1C100S这颗料是要停产了吗 官网连型号也查不到 » 2025-03-25 10:31:57
#54 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 一个简单的Linux线程通讯测试 » 2025-03-08 02:02:38
改为 tinyplay 播放:
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
// 共享数据及同步变量
static pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
static char play_filename[256] = {0};
static int play_request = 0;
extern int tinyplay(int argc, const char **argv);
void* audioplay_thread(void* arg)
{
(void)arg;
while (1)
{
pthread_mutex_lock(&mutex);
while (!play_request) {
printf("now waiting signal ...\n");
pthread_cond_wait(&cond, &mutex);
printf("signal waited!\n");
}
printf("in audio play thread\n");
play_request = 0; // 重置请求标志
pthread_mutex_unlock(&mutex);
printf("now playing: %s\n", play_filename);
const char* argv[] = {"play", play_filename};
int argc = sizeof(argv) / sizeof(argv[0]);
tinyplay(argc, argv);
//usleep(3*1000*1000);
}
}
// 初始化并启动播放线程
void init_playback_thread() {
pthread_t tid;
pthread_create(&tid, NULL, audioplay_thread, NULL);
}
// 触发播放的函数
void request_play(const char* filename) {
pthread_mutex_lock(&mutex);
strncpy(play_filename, filename, sizeof(play_filename)-1);
play_filename[sizeof(play_filename)-1] = '\0';
play_request = 1;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
}
int main() {
init_playback_thread();
// 模拟其他线程触发播放
request_play("test.wav");
while(1)
{
char ch = getchar();
if((ch == 'a') || (ch == 'A')) {
request_play("/usr/lib/libreoffice/share/gallery/sounds/ok.wav");
}
}
return 0;
}#55 VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 一个简单的Linux线程通讯测试 » 2025-03-08 01:26:58
- ubuntu
- 回复: 1
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
// 共享数据及同步变量
static pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
static char play_filename[256] = {0};
static int play_request = 0;
void* audioplay_thread(void* arg)
{
(void)arg;
while (1)
{
pthread_mutex_lock(&mutex);
while (!play_request) {
printf("now waiting signal ...\n");
pthread_cond_wait(&cond, &mutex);
printf("signal waited!\n");
}
printf("in audio play thread\n");
play_request = 0; // 重置请求标志
pthread_mutex_unlock(&mutex);
printf("now playing: %s\n", play_filename);
usleep(3*1000*1000);
}
}
// 初始化并启动播放线程
void init_playback_thread() {
pthread_t tid;
pthread_create(&tid, NULL, audioplay_thread, NULL);
}
// 触发播放的函数
void request_play(const char* filename) {
pthread_mutex_lock(&mutex);
strncpy(play_filename, filename, sizeof(play_filename)-1);
play_filename[sizeof(play_filename)-1] = '\0';
play_request = 1;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
}
int main() {
init_playback_thread();
// 模拟其他线程触发播放
request_play("test.wav");
while(1)
{
char ch = getchar();
if((ch == 'a') || (ch == 'A')) {
request_play("test.wav");
}
}
return 0;
}#56 Re: 全志 SOC » 求大神指教,全志T507 PWM怎么实现发送固定脉冲数 » 2025-03-04 09:47:57
#58 Re: 全志 SOC » 8.8元的 ML307R-DL 4G CAT.1 模块 » 2025-01-16 10:16:49
#60 Re: 全志 SOC » 45块顺丰包邮买到的10.1寸保资LCD价签F1C200S 值不值 » 2025-01-09 19:19:56
大佬,"年月日"这几个字可以用中文吗?时分秒的字体可以更大一些,我打算寒假回去挂家里大厅,给我老妈用,谢谢啦。
#62 Re: 工业芯 匠芯创 » D211XXX USB副屏驱动 » 2025-01-07 08:52:19
#63 Re: 全志 SOC » 8.8元的 ML307R-DL 4G CAT.1 模块 » 2024-12-24 15:58:32
#64 Re: 全志 SOC » 8.8元的 ML307R-DL 4G CAT.1 模块 » 2024-12-24 13:18:56
#73 Re: 全志 SOC » 三张Linux I2S声卡可以玩 5.1杜比音效吗? » 2024-08-31 12:02:08
#74 Re: 全志 SOC » 三张Linux I2S声卡可以玩 5.1杜比音效吗? » 2024-08-30 20:22:35
使用ALSA
如果你更喜欢使用ALSA,可以使用多个混音器来组合不同的声道。首先,确认你的声卡设备名称,然后创建一个自定义的混音器文件来组合多个声道。
编辑
/etc/asound.conf:
创建或编辑/etc/asound.conf文件,定义一个新的混音器设备,将多个声卡组合在一起。例如:
pcm.multichannel {
type multi
playback_switch {
slave {
pcm "hw:0,0"
}
slave {
pcm "hw:1,0"
}
slave {
pcm "hw:2,0"
}
}
} 在这里,hw:0,0、hw:1,0 和 hw:2,0 分别代表三张声卡的设备名称。你需要根据实际的设备名称进行替换。
设置默认PCM设备:
确保你的系统将新创建的混音器设备设置为默认PCM设备。
3. 测试和调整
完成配置后,测试音频输出是否正确。你可以播放一段5.1声道的音频文件,并检查每个扬声器是否输出正确的声道声音。
4. 自动化脚本
为了简化每次启动时的配置过程,可以编写一个脚本来自动加载所需的PulseAudio模块或ALSA配置,并设置默认音频设备。
注意事项
确保所有声卡都正确连接并且工作正常。
扬声器的布线和设置也非常重要,确保每个扬声器连接到正确的输出端口。
由于声道映射需要精确设置,可能需要多次调整才能达到理想的效果。
通过上述步骤,你可以利用三张双声道声卡在Linux系统中实现5.1声道环绕声。
#76 Re: 工业芯 匠芯创 » D13x 有现成的 ntp 功能吗? » 2024-08-29 07:51:30
#78 Re: 全志 SOC » ubuntu 22.03不能显示中文是哪里不对啊? » 2024-08-28 17:10:18
#79 Re: 全志 SOC » H3主线U-boot之环境变量 » 2024-08-27 12:11:32
#80 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » “微软雅黑”不可商用!为了避免日后被字体公司索(qiao)赔(zha), 请尽快改用商业免费字体. » 2024-08-13 11:03:18
#81 Re: ESP32/ESP8266 » ESP32-P4终于可以购买了, 官网tb开发板499, 小贵, » 2024-08-08 10:00:47
这是学多年前长城哈佛的玩法吗?一个H6玩到底
#82 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 很好奇,这种 html方块图(不是图片!)是用什么软件做的? » 2024-08-07 21:48:20
#85 Re: 全志 SOC » T113中断读取io状态赋值设置另外一个io 输出电平不同步 » 2024-08-06 23:47:49
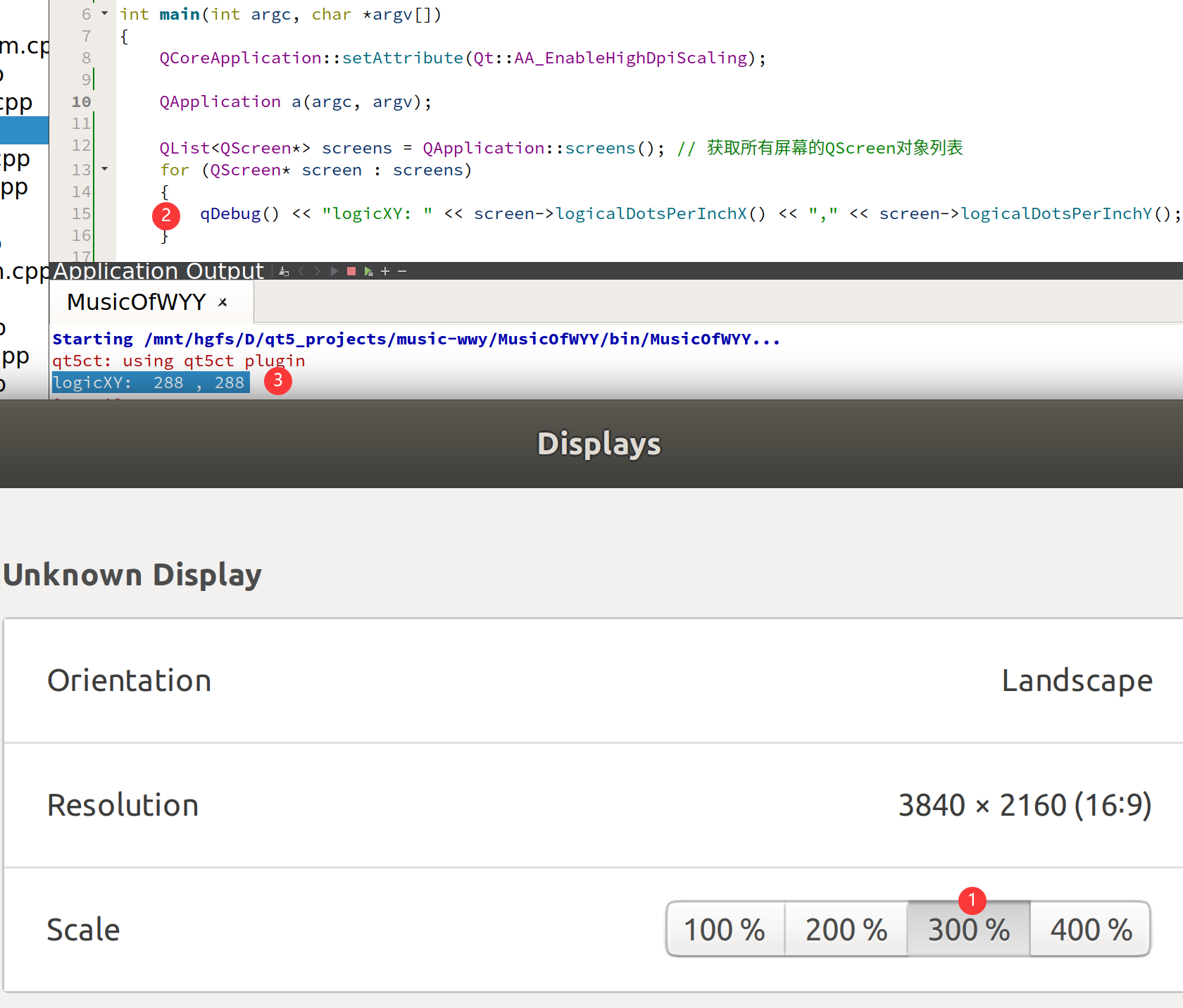
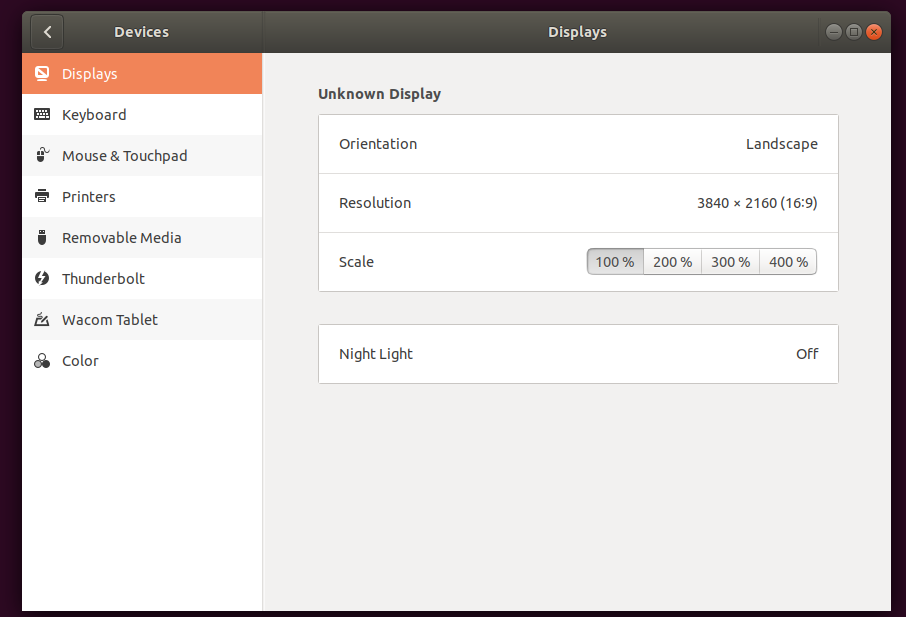
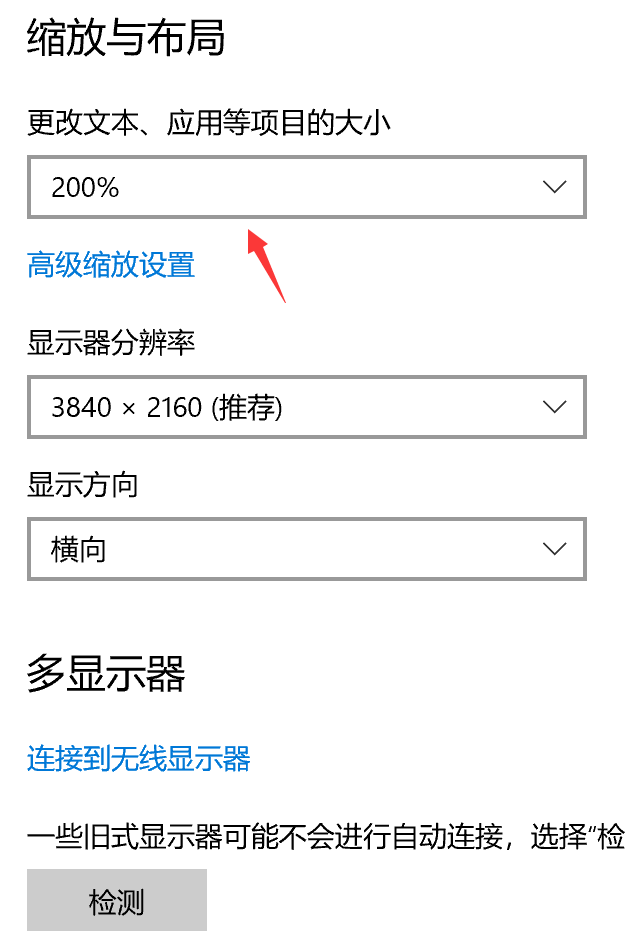
#86 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 请问如何获取windows和Ubuntu的缩放值 » 2024-07-16 21:16:13
#88 Re: 全志 SOC » D1 用主线的 linux 装了 debian lxde,rgb 屏桌面很卡,动一下 Xorg 的 cpu 占用就会非常高 » 2024-07-08 11:03:43
#89 Re: 全志 SOC » D1s调试lvds,求解? » 2024-07-08 08:57:05
#90 Re: 全志 SOC » xr829扫描不到wifi » 2024-07-06 23:48:27
#91 Re: 人工智能,深度学习,神经网络,OpenAI,阿里通义 » Ubuntu Python3.8 使用阿里通义API,大模型的平民化时代到来,调用费用相当便宜,1元钱可以调用数万次 » 2024-07-05 11:26:43
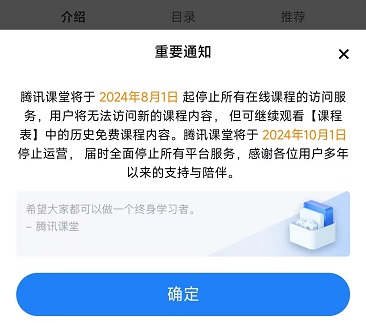
#92 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 马花腾你个狗日的,前几年在【腾讯课堂】买的课不但不能观看,连记录都查不到了,客服也没有! » 2024-07-05 11:23:09
#93 Re: 工业芯 匠芯创 » 匠芯创 D211,7寸mipi屏核心板 » 2024-06-29 11:08:02
#94 Re: 全志 SOC » v851s g2d 模块 sample 深究 » 2024-06-28 14:03:23
#95 Re: 全志 SOC » st7789v编译不通过,求助 » 2024-06-25 08:22:36
#96 全志 SOC » 请问T113 LVGL DEMO G2D_CMD_BITBLT_H failed: Operation not permitte是什么问题? » 2024-06-25 08:15:26
- ubuntu
- 回复: 2
# chmod +x /tmp/lvgl_sunxifb && /tmp/lvgl_sunxifb 0
wh=1200x1920, vwh=1200x3840, bpp=32, rotated=0
Turn on double buffering.
Turn on 2d hardware acceleration.
Turn on 2d hardware acceleration rotate.
Error: sunxifb_g2d_blit_to_fb G2D_CMD_BITBLT_H failed: Operation not permitted
sunxifb_g2d_blit_to_fb src[phy=0x1200000 format=0 alpha=255 wh=[1200 1920] clip=[0 0 1200 1920]] dst=[phy=(nil) format=0 wh=[1200 3840] clip=[0 0 1200 1920]]
Error: sunxifb_g2d_blit_to_fb G2D_CMD_BITBLT_H failed: Operation not permitted
sunxifb_g2d_blit_to_fb src[phy=0x1200000 format=0 alpha=255 wh=[1200 1920] clip=[0 0 1200 1920]] dst=[phy=(nil) format=0 wh=[1200 3840] clip=[0 1920 1200 1920]]
Error: sunxifb_g2d_blit_to_fb G2D_CMD_BITBLT_H failed: Operation not permitted
sunxifb_g2d_blit_to_fb src[phy=0x1200000 format=0 alpha=255 wh=[1200 1920] clip=[0 0 1200 1920]] dst=[phy=(nil) format=0 wh=[1200 3840] clip=[0 0 1200 1920]]
Error: sunxifb_g2d_blit_to_fb G2D_CMD_BITBLT_H failed: Operation not permitted
sunxifb_g2d_blit_to_fb src[phy=0x1200000 format=0 alpha=255 wh=[1200 1920] clip=[0 0 1200 1920]] dst=[phy=(nil) format=0 wh=[1200 3840] clip=[0 1920 1200 1920]]#98 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » Qt5 自定义UI控件,有温度计,雷达扫描板,车载仪表,指南针 » 2024-06-17 21:50:41
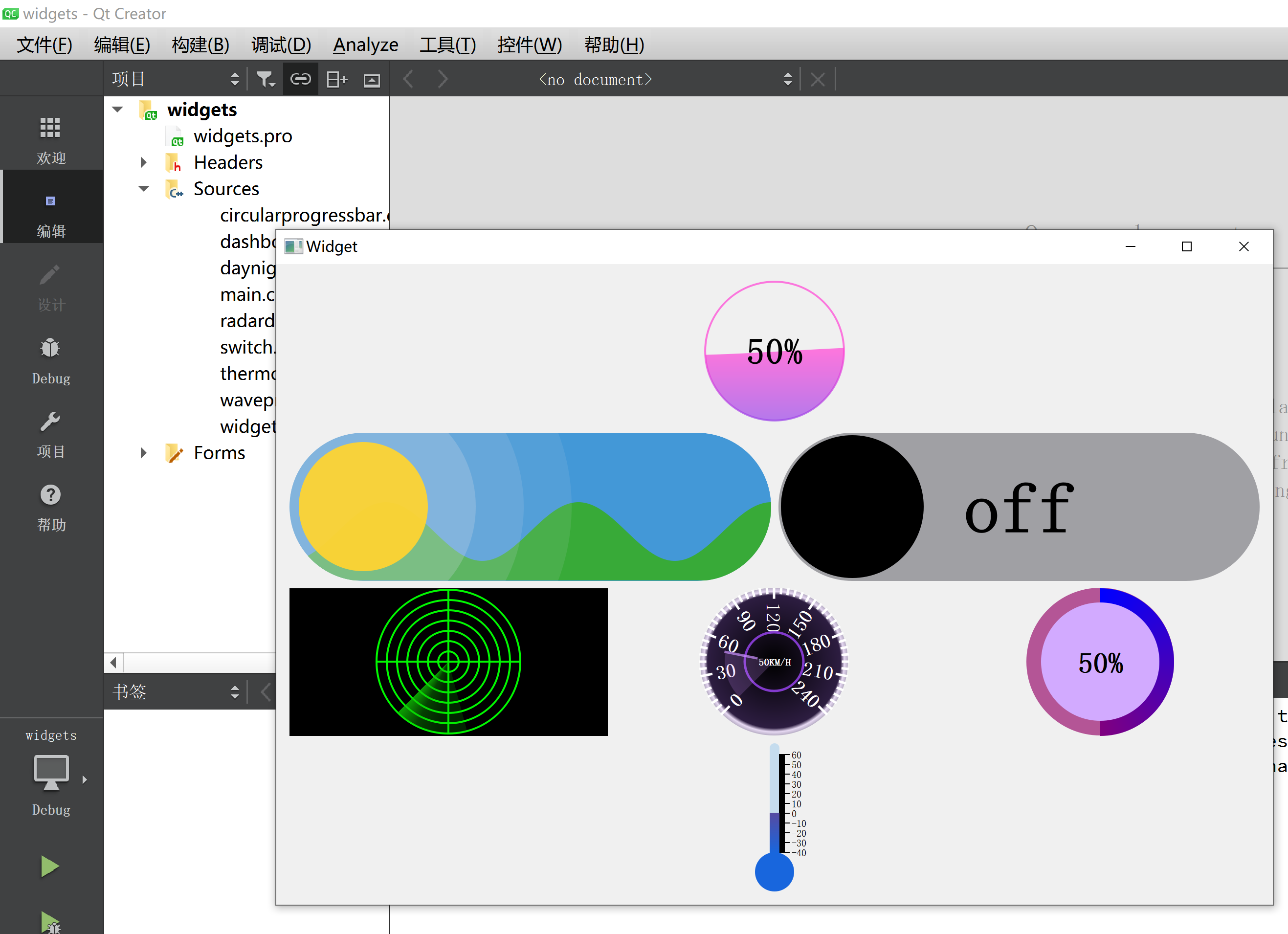
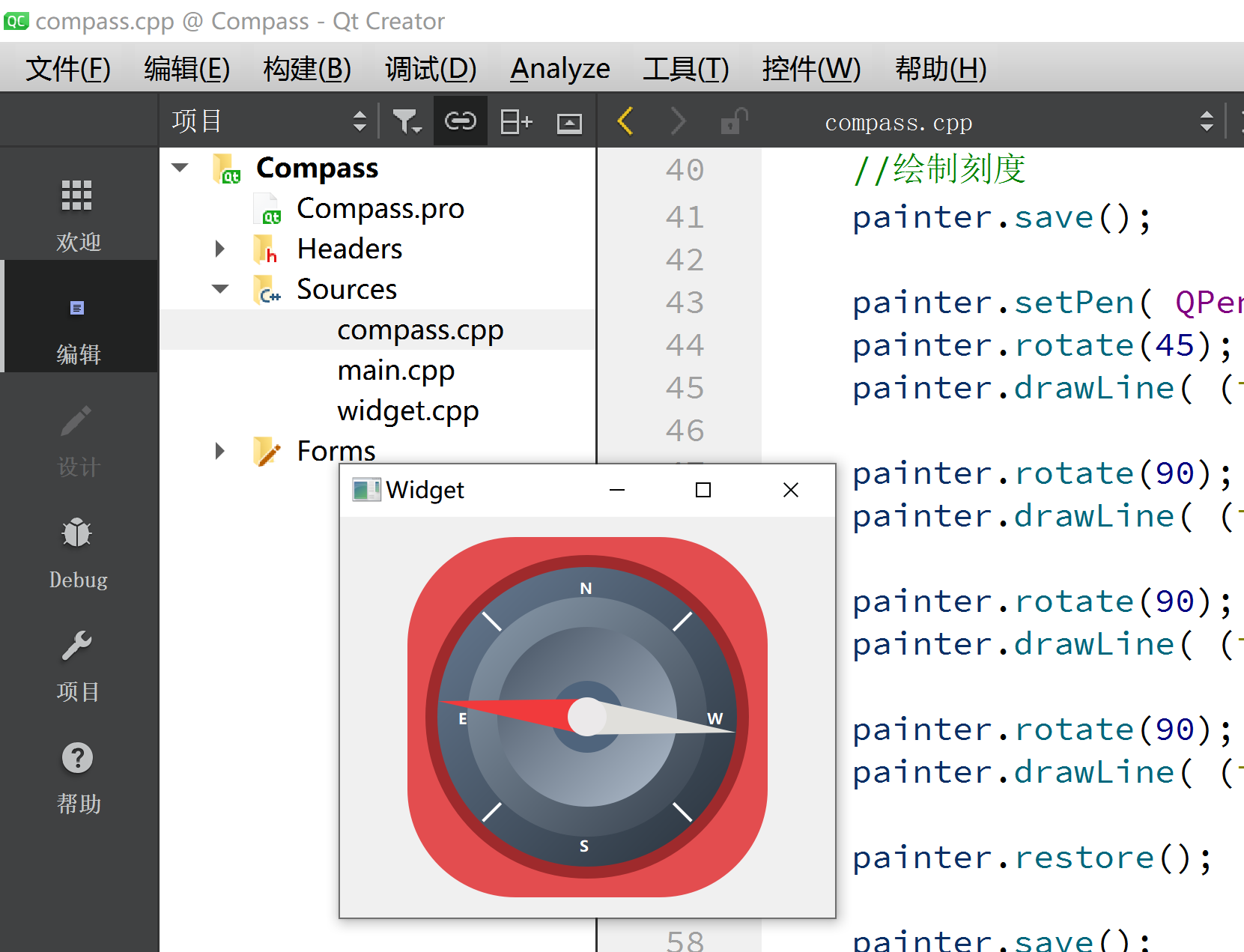
#99 Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » Qt5 自定义UI控件,有温度计,雷达扫描板,车载仪表,指南针 » 2024-06-17 21:50:38
- ubuntu
- 回复: 4
#101 Re: 全志 SOC » V3S串口921600波特率使用 » 2024-05-21 14:03:26
#102 Re: 全志 SOC » 咨询下芯片电源用EA3036的好处?用三个ASM1117不是也可以么? » 2024-05-20 10:37:15
#103 Re: 全志 SOC » 全志v3s 加4g模块 » 2024-05-18 00:02:26
#105 Re: 全志 SOC » 全志v3s 加4g模块 » 2024-05-13 13:46:31
#106 Re: 全志 SOC » 开源 T113-s3 图纸 » 2024-05-12 22:21:29
#107 Re: 全志 SOC » linux的2038问题有哪位大佬处理过吗,帮忙指点下? » 2024-05-06 12:07:05
#110 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 基于 Linux 的开源智能家居系统 » 2024-05-03 09:41:31
其中用的json解析器: https://github.com/DaveGamble/cJSON
#113 Re: 感芯科技 » 老电脑装Linux能恢复青春吗? » 2024-04-25 16:30:54
#114 Re: 全志 SOC » 移植RTL8733BU蓝牙模组 » 2024-04-19 17:13:40
#115 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » AI是否能统一硬件设计行业? » 2024-04-13 13:30:30
#118 Re: 全志 SOC » 在开发板中运行app时出现Segmentation fault » 2024-04-07 13:29:33
#119 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » AI是否能统一硬件设计行业? » 2024-04-07 13:28:10
#120 Re: 全志 SOC » T113-i spi nand 启动失败 » 2024-04-03 21:09:35
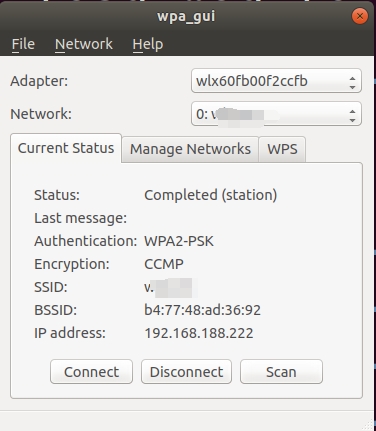
#121 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » Ubuntu下普通用户运行 wpa_gui 出错的解决方案 » 2024-03-19 17:11:40
#122 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » Ubuntu下普通用户运行 wpa_gui 出错的解决方案 » 2024-03-19 16:56:00
#124 Re: 全志 SOC » 有没有大佬搞过全志量产的厂测软件啊 » 2024-03-15 14:48:27
#125 Re: 全志 SOC » adb提示No space left on device » 2024-03-14 11:13:31
#126 Re: 全志 SOC » adb提示No space left on device » 2024-03-14 10:32:42
#127 Re: 全志 SOC » AIC800G3到底是个什么样的存在? » 2024-02-26 19:37:18
#128 Re: 全志 SOC » 想找个系统稳定的板子学linux,做点小玩意,树莓派,全志,瑞芯微,..... » 2024-01-24 10:30:53
闲鱼捡漏,拆解一台收银机【多图警告,流量党劝退】
https://whycan.com/t_3424.html
#132 Re: 全志 SOC » 小白自制Linux开发板(F1C200s)整理系列,持续更新中 » 2023-12-03 23:51:17
#133 Re: 全志 SOC » 记录全志A133的u-boot读写设备树,免改固件在线调试 » 2023-11-30 16:48:29
fdt set /soc@03000000/lcd0@01c0c000/ lcd_x <1024>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_y <400>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_dclk_freq <35>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_hbp <170>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_ht <1344>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_hspw <20>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vbp <20>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vt <435>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vspw <5>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_x <1024>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_y <600>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_dclk_freq <52>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_hbp <170>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_ht <1364>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_hspw <10>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vbp <20>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vt <635>
fdt set /soc@03000000/lcd0@01c0c000/ lcd_vspw <5>
#134 Re: 全志 SOC » 记录全志A133的u-boot读写设备树,免改固件在线调试 » 2023-11-30 16:18:21
#135 Re: 全志 SOC » 记录全志A133的u-boot读写设备树,免改固件在线调试 » 2023-11-30 16:13:28
#137 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 分享咸鱼上便宜的两款微型投影驱动玩玩,一款驱动简单,一款分辨率高,都是LCOS屏的。欢迎探讨交流 » 2023-11-28 11:28:22
#138 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请问,现在很多soc有算力,比如0.5T或者1T,这样的片子具体应用在哪些场合呢? » 2023-11-27 15:22:39
#140 Re: 全志 SOC » 一个简单的 linux fb0 双缓冲切换demo » 2023-11-27 11:18:19
#141 全志 SOC » 一个简单的 linux fb0 双缓冲切换demo » 2023-11-27 11:14:48
- ubuntu
- 回复: 1
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/mman.h>
#include <sys/ioctl.h>
#include <linux/fb.h>
#define WIDTH 480
#define HEIGHT 480
#define BYTES_PER_PIXEL 4
int main() {
int fb = open("/dev/fb0", O_RDWR);
if (fb == -1) {
perror("Unable to open framebuffer");
return 1;
}
struct fb_var_screeninfo vinfo;
ioctl(fb, FBIOGET_VSCREENINFO, &vinfo);
printf("vinfo.xres=%d, vinfo.yres=%d\n", vinfo.xres, vinfo.yres);
printf("vinfo.xres_virtual=%d, vinfo.yres_virtual=%d\n", vinfo.xres_virtual, vinfo.yres_virtual);
ioctl(fb, FBIOGET_VSCREENINFO, &vinfo);
unsigned char *fbp = mmap(0, vinfo.yres_virtual * vinfo.xres * BYTES_PER_PIXEL, PROT_READ | PROT_WRITE, MAP_SHARED, fb, 0);
// 填充第一个缓冲区
for (int y = 0; y < vinfo.yres; y++)
for (int x = 0; x < vinfo.xres; x++)
*((unsigned long*)(fbp + 4*x + 4*y*vinfo.xres)) = 0xFF00FFFF;
// 填充第二个缓冲区
for (int y = vinfo.yres; y < 2*vinfo.yres; y++)
for (int x = 0; x < vinfo.xres; x++)
*((unsigned long*)(fbp + 4*x + 4*y*vinfo.xres)) = 0xFFFF00FF;
int i = 0;
while(1)
{
// 切换到第二个缓冲区
vinfo.yoffset = (i++%2)*HEIGHT;
printf("vinfo.yoffset = %d\n", vinfo.yoffset);
if(0 != ioctl(fb, FBIOPAN_DISPLAY, &vinfo))
{
printf("fb iopan display error.\n");
}
sleep(1);
}
munmap(fbp, vinfo.yres_virtual * vinfo.xres * BYTES_PER_PIXEL);
close(fb);
return 0;
}#142 Re: 全志 SOC » t113 udhcpc问题 » 2023-11-27 11:13:03
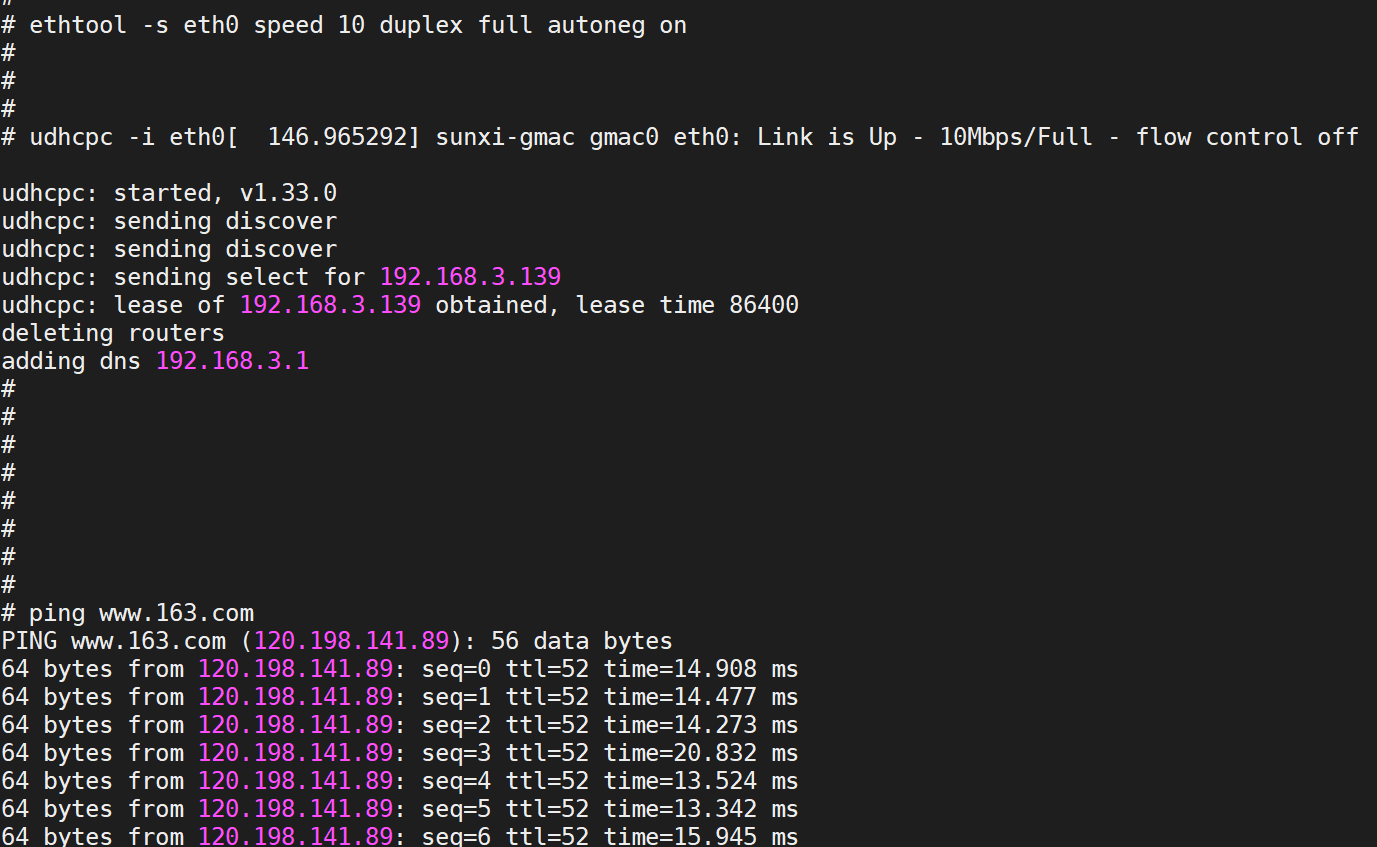
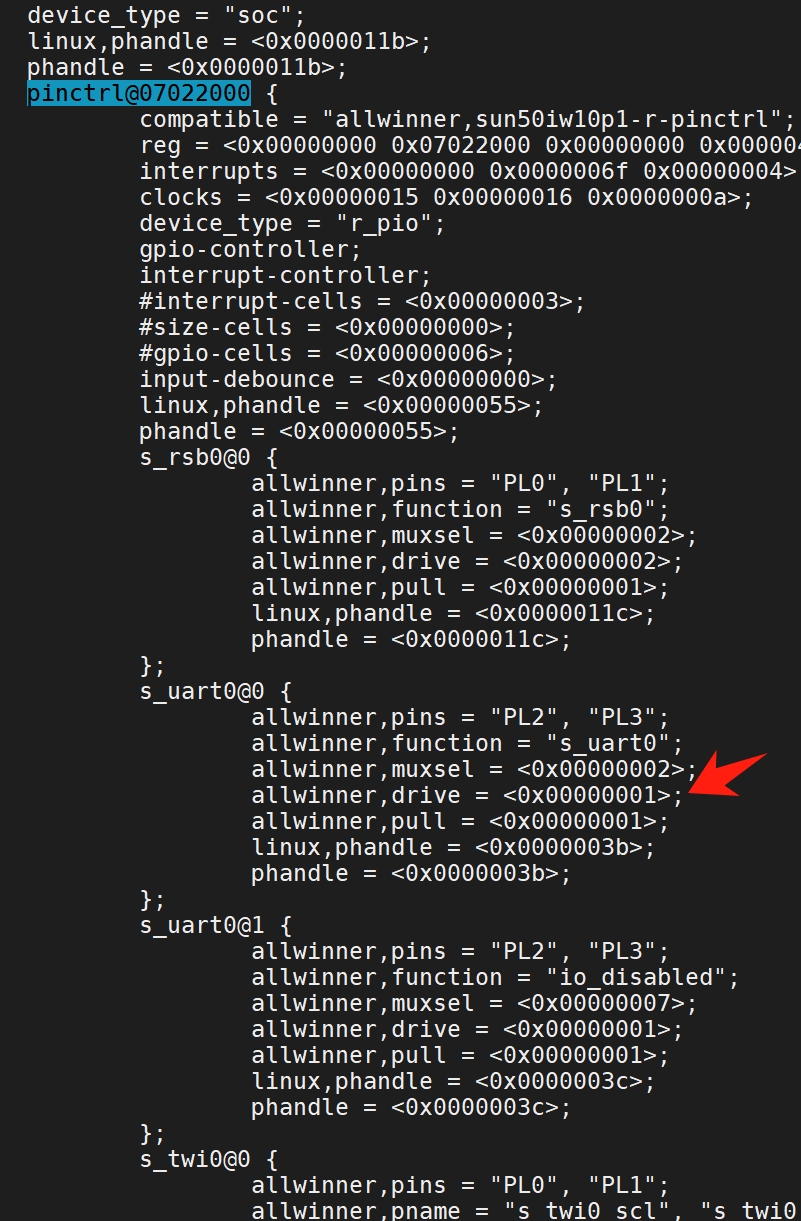
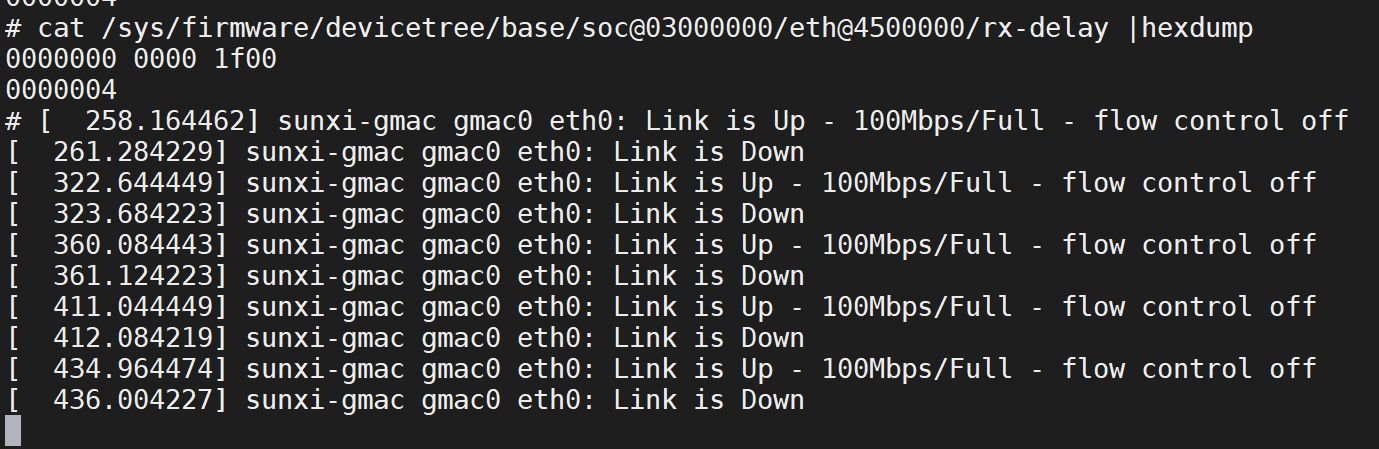
#145 Re: 全志 SOC » V853网卡RTL8211F 1Gbps网卡时通时不通,是不是 tx-delay, rx-delay不对啊? » 2023-11-16 16:58:03
=> fdt list /soc@03000000/pinctrl@02000000/gmac0@0/
gmac0@0 {
allwinner,pins = "PE0", "PE1", "PE2", "PE3", "PE4", "PE5", "PE6", "PE7", "PE8", "PE9", "PE10", "PE11", "PE12", "PE13", "PE14", "PE15";
allwinner,function = "rgmii";
allwinner,drive = "0";
allwinner,muxsel = <0x00000003>;
allwinner,pull = <0x00000000>;
linux,phandle = <0x00000097>;
phandle = <0x00000097>;
};
=>
=>
=>
=> fdt set /soc@03000000/pinctrl@02000000/gmac0@0/ allwinner,drive 3
=>
=>
=> fdt list /soc@03000000/pinctrl@02000000/gmac0@0/
gmac0@0 {
allwinner,pins = "PE0", "PE1", "PE2", "PE3", "PE4", "PE5", "PE6", "PE7", "PE8", "PE9", "PE10", "PE11", "PE12", "PE13", "PE14", "PE15";
allwinner,function = "rgmii";
allwinner,drive = "3";
allwinner,muxsel = <0x00000003>;
allwinner,pull = <0x00000000>;
linux,phandle = <0x00000097>;
phandle = <0x00000097>;
};
=>#146 Re: 全志 SOC » V853网卡RTL8211F 1Gbps网卡时通时不通,是不是 tx-delay, rx-delay不对啊? » 2023-11-16 16:56:23
https://www.cnblogs.com/hylife/p/17340965.html
全志Uboot fdt修改DTS进行临时调试的方法
#147 Re: 全志 SOC » V853网卡RTL8211F 1Gbps网卡时通时不通,是不是 tx-delay, rx-delay不对啊? » 2023-11-16 16:28:28
https://bbs.16rd.com/thread-587397-1-1.html
全志怎么没出RK这种测试工具呢?
#149 全志 SOC » A133 tina5 reboot 不成功,可能是什么问题引起呢? » 2023-11-15 12:05:56
- ubuntu
- 回复: 0
root@OpenWrt:/#
root@OpenWrt:/# reboot
root@OpenWrt:/# [ 131.812780] br-lan: port 1(eth0) entered disabled state
[ 131.825385] device eth0 left promiscuous mode
[ 131.830628] br-lan: port 1(eth0) entered disabled state
[ 131.846463] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 136.189181] sunxi-mmc sdc2: sdc set ios:clk 0Hz bm PP pm OFF vdd 0 width 1 timing LEGACY(SDR12) dt B
[ 136.200895] [alarmtimer] have no shutdown alarm! alarmtimer_shutdown 322
[ 137.161378] reboot: Restarting system#150 Re: 工业芯 匠芯创 » RISC-V高性能显示控制跨界MCU D13x系列Datasheet » 2023-11-13 11:12:49
#151 Re: 工业芯 匠芯创 » 萌新来啦,匠芯创正式入驻WhyCan,第一波小福利正在准备中。。。。 » 2023-11-13 10:53:47
#152 Re: 全志 SOC » 做了一块f1c200s小板子 » 2023-11-03 22:46:38
#153 Re: 全志 SOC » V3S TF启动正常,但是USB无法工作的问题? » 2023-10-27 11:14:20
#154 Re: 全志 SOC » 求买了韦老板的R128开发板的好心人分享R128的资料 » 2023-10-16 16:04:07
#155 Re: 全志 SOC » 全志R128来袭,有想入坑的吗?我先来点初步研究成果 » 2023-10-16 14:55:59
#156 Re: 全志 SOC » 开源智能家居V3s CAN转以太网网关,附openwrt19.07.7 » 2023-10-13 15:48:39
make package/feeds/packages/canutils/compile V=s
make[1]: Entering directory '/opt2/openwrt/openwrt_v3s_can_gateway'
make[2]: Entering directory '/opt2/openwrt/openwrt_v3s_can_gateway/package/libs/toolchain'
echo "libc" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/toolchain.default.install
echo "libgcc" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/toolchain.default.install
echo "libpthread" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/toolchain.default.install
echo "librt" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/toolchain.default.install
make[2]: Leaving directory '/opt2/openwrt/openwrt_v3s_can_gateway/package/libs/toolchain'
time: package/libs/toolchain/compile#0.12#0.04#0.16
make[2]: Entering directory '/opt2/openwrt/openwrt_v3s_can_gateway/feeds/packages/utils/canutils'
mkdir -p /opt2/openwrt/openwrt_v3s_can_gateway/dl
SHELL= flock /opt2/openwrt/openwrt_v3s_can_gateway/tmp/.canutils-2017-02-16-cb33a557.tar.xz.flock -c ' /opt2/openwrt/openwrt_v3s_can_gateway/scripts/download.pl "/opt2/openwrt/openwrt_v3s_can_gateway/dl" "canutils-2017-02-16-cb33a557.tar.xz" "d9c01eeff3d81a28161ca5c3937ec005a1f49ca3eb97bee0164d53cc66365786" "" || ( /opt2/openwrt/openwrt_v3s_can_gateway/scripts/dl_github_archive.py --dl-dir="/opt2/openwrt/openwrt_v3s_can_gateway/dl" --url="https://github.com/linux-can/can-utils" --version="cb33a55720716cbe01e6025a2bda74a1b7e492d3" --subdir="canutils-2017-02-16-cb33a557" --source="canutils-2017-02-16-cb33a557.tar.xz" --hash="d9c01eeff3d81a28161ca5c3937ec005a1f49ca3eb97bee0164d53cc66365786" || ( echo "Checking out files from the git repository..."; mkdir -p /opt2/openwrt/openwrt_v3s_can_gateway/tmp/dl && cd /opt2/openwrt/openwrt_v3s_can_gateway/tmp/dl && rm -rf canutils-2017-02-16-cb33a557 && [ \! -d canutils-2017-02-16-cb33a557 ] && git clone https://github.com/linux-can/can-utils canutils-2017-02-16-cb33a557 && (cd canutils-2017-02-16-cb33a557 && git checkout cb33a55720716cbe01e6025a2bda74a1b7e492d3 && git submodule update --init --recursive) && echo "Packing checkout..." && export TAR_TIMESTAMP=`cd canutils-2017-02-16-cb33a557 && git log -1 --format='\''@%ct'\''` && rm -rf canutils-2017-02-16-cb33a557/.git && tar --numeric-owner --owner=0 --group=0 --mode=a-s --sort=name ${TAR_TIMESTAMP:+--mtime="$TAR_TIMESTAMP"} -c canutils-2017-02-16-cb33a557 | xz -zc -7e > /opt2/openwrt/openwrt_v3s_can_gateway/tmp/dl/canutils-2017-02-16-cb33a557.tar.xz && mv /opt2/openwrt/openwrt_v3s_can_gateway/tmp/dl/canutils-2017-02-16-cb33a557.tar.xz /opt2/openwrt/openwrt_v3s_can_gateway/dl/ && rm -rf canutils-2017-02-16-cb33a557; ); ) '
echo "canutils" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/canutils.default.install
echo "canutils-candump" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/canutils.default.install
echo "canutils-cansend" >> /opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/pkginfo/canutils.default.install
make[2]: Leaving directory '/opt2/openwrt/openwrt_v3s_can_gateway/feeds/packages/utils/canutils'
time: package/feeds/packages/canutils/compile#0.95#0.49#1.42
make[1]: Leaving directory '/opt2/openwrt/openwrt_v3s_can_gateway'这个正常
#157 Re: 全志 SOC » 开源智能家居V3s CAN转以太网网关,附openwrt19.07.7 » 2023-10-13 15:34:23
Configuring luci.
Configuring luci-i18n-opkg-zh-cn.
Configuring procps-ng-top.
Configuring luci-i18n-opkg-en.
Configuring luci-i18n-base-en.
Configuring procps-ng-pmap.
Configuring kmod-ipt-offload.
Configuring urngd.
Configuring procps-ng-pgrep.
Configuring luci-i18n-firewall-zh-cn.
Configuring ppp-mod-pppoe.
Configuring canutils-candump.
Collected errors:
* satisfy_dependencies_for: Cannot satisfy the following dependencies for ip-full:
* libcap
* opkg_install_cmd: Cannot install package ip-full.
package/Makefile:65: recipe for target 'package/install' failed
make[2]: *** [package/install] Error 255
make[2]: Leaving directory '/opt2/openwrt/openwrt_v3s_can_gateway'
package/Makefile:108: recipe for target '/opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/stamp/.package_install' failed
make[1]: *** [/opt2/openwrt/openwrt_v3s_can_gateway/staging_dir/target-arm_cortex-a7+neon-vfpv4_musl_eabi/stamp/.package_install] Error 2
make[1]: Leaving directory '/opt2/openwrt/openwrt_v3s_can_gateway'
/opt2/openwrt/openwrt_v3s_can_gateway/include/toplevel.mk:225: recipe for target 'world' failed
make: *** [world] Error 2[/b]
[b]real 6m44.278s
user 5m32.328s
sys 1m35.930s
#咦,编译错误了
#158 Re: 全志 SOC » 请问 eth0 和 wlan0 作为lan连接内网,且可以互通,eth1作为wan口接入互联网,这个用linux命令行怎么表达。 » 2023-10-11 18:11:44
这个aic8800 的wlan0 没法加入br0
# brctl addif br0 wlan0
can't add wlan0 to bridge br0: Operation not supported查了一下
这个错误可能是由于你尝试将一个无线接口(wlan0)添加到网桥,但是许多无线设备并不支持这种操作。这是由于802.11 WiFi规定的限制和驱动程序实现的问题。
一种可能的解决方案是将无线接口设置为四层(IP层)而非二层(以太网层)的转发模式。你可以使用Linux的网络地址转换(NAT)功能或者IP路由来实现这个目标。例如,你可以使用iptables和netfilter来配置NAT和防火墙规则,从而允许通过wlan0接收到的数据包在eth0和其他接口之间转发。
另外一个方法是使用第三方工具,如hostapd,它可以将无线网卡设置为AP模式(如果硬件支持),然后创建一个虚拟的有线接口,并将该接口加入到网桥。
需要注意的是,具体的解决方案取决于你的具体需求和环境,包括你的硬件、驱动程序、网络环境和安全需求等因素。
感觉可能是驱动问题。
#159 Re: 全志 SOC » 请问 eth0 和 wlan0 作为lan连接内网,且可以互通,eth1作为wan口接入互联网,这个用linux命令行怎么表达。 » 2023-10-11 15:30:33
#160 Re: 全志 SOC » 请问 eth0 和 wlan0 作为lan连接内网,且可以互通,eth1作为wan口接入互联网,这个用linux命令行怎么表达。 » 2023-10-11 15:15:36
#161 全志 SOC » 请问 eth0 和 wlan0 作为lan连接内网,且可以互通,eth1作为wan口接入互联网,这个用linux命令行怎么表达。 » 2023-10-11 15:13:45
#163 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 有啥办法能在手机不知道的情况下把屏幕数据送到电脑上? » 2023-10-02 20:29:01
#164 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 有啥办法能在手机不知道的情况下把屏幕数据送到电脑上? » 2023-10-02 17:30:51
之前是电子工程师,现在失业送外卖,不过送外卖也没单。没外挂只能吃西北风了
楼主是搞笑的吗?
试一试这个方案:
投屏软件scrcpy在Linux上的移植(porting scrcpy to linux)
https://whycan.com/t_2736.html#p22190
#165 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » 求助LVGL8.1版本该怎么做出弧形文本的效果呢 » 2023-09-28 17:47:11
#166 Re: 全志 SOC » 手头有个野火的imx开发板,没有屏幕,默认烧录的镜像有fb0设备,用fbgrab也可以抓到图,我想安装个vncserver实时看fb0的图片 » 2023-09-17 20:15:09
3050311118 wrote:
成功了,还可以鼠标控制,太牛了/files/members/5129/微信截图_20230917192134.png
6666
分享一下怎么弄出来的
#167 Re: 全志 SOC » 终于搞定f1c100s的i2s输出 » 2023-08-28 08:29:42
#168 Re: 全志 SOC » 做了5块板子,有一块板子用udhcpc获取ip地址总是不成功。 » 2023-08-23 11:25:12
#169 Re: Cortex M0/M3/M4/M7 » 灵动微 MCU 开发板赠送活动 » 2023-08-08 18:24:40
#176 Re: 全志 SOC » 全志R128来袭,有想入坑的吗?我先来点初步研究成果 » 2023-05-14 09:19:19
#177 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2023-05-04 23:12:44
#include "lvgl/lvgl.h"
#define DOUBLE_CLICK_TIME_MS 300 // 双击事件的最大时间间隔(毫秒)
static uint32_t last_click_time = 0;
static void btn_event_cb(lv_obj_t * obj, lv_event_t event)
{
if (event == LV_EVENT_SHORT_CLICKED) {
uint32_t now = lv_tick_get();
if ((now - last_click_time) < DOUBLE_CLICK_TIME_MS) {
printf("Double click!\n");
last_click_time = 0;
}
else {
printf("Single click.\n");
last_click_time = now;
}
}
}
int main(void)
{
lv_init();
// 创建一个按钮控件
lv_obj_t * btn = lv_btn_create(lv_scr_act(), NULL);
// 设置按钮的单击事件回调函数
lv_obj_set_event_cb(btn, btn_event_cb);
while(1) {
lv_task_handler(); // 处理 LVGL 任务
}
return 0;
}
在上面的示例中,当按钮被单击时,btn_event_cb() 回调函数会被触发,并检查两次事件之间的时间间隔。如果小于固定时间间隔,则输出 "Double click!",否则输出 "Single click."。
请注意,本示例代码使用了 lv_tick_get() 函数来获取当前系统时间,该函数需要您配置并启用 LVGL 的计时器(在 lv_conf.h 中进行配置)。另外,您可以通过修改 DOUBLE_CLICK_TIME_MS 宏来自定义双击事件的时间间隔。
#179 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2023-05-04 13:42:59
static void drag_event_handler(lv_event_t * e)
{
lv_obj_t * obj = lv_event_get_target(e);
lv_indev_t * indev = lv_indev_get_act();
lv_point_t vect;
lv_indev_get_vect(indev, &vect);
lv_coord_t x = lv_obj_get_x(obj) + vect.x;
lv_coord_t y = lv_obj_get_y(obj) + vect.y;
lv_obj_set_pos(obj, x, y);
}
/**
* Make an object dragable.
*/
void lv_example_obj_2(void)
{
lv_obj_t * obj;
obj = lv_obj_create(lv_scr_act());
lv_obj_set_size(obj, 150, 100);
lv_obj_add_event_cb(obj, drag_event_handler, LV_EVENT_PRESSING, NULL);
lv_obj_t * label = lv_label_create(obj);
lv_label_set_text(label, "Drag me");
lv_obj_center(label);
}拖拽屏幕上面的控件
#180 Re: 全志 SOC » R528-s3点7.84" MIPI屏 » 2023-04-20 13:29:24
#181 Re: 全志 SOC » 第一次发帖好紧张。请问全志的 /dev/disp 用来干嘛的? » 2023-04-17 21:44:53
#183 Re: Qt/MSVC/MINGW/C++/MFC/GTK+/Delphi/BCB » 发现一个非常不错的项目,YUV播放器和分析工具, 使用Qt编写. » 2023-04-05 12:08:55
#186 Re: 全志 SOC » LVGL视频播放界面实现方法 » 2022-12-27 16:00:43
#187 Re: 全志 SOC » 昨天有朋友在 Q群问如何读spi nor flash(W25Q128/MX25L256)的唯一Id(UID), 刚好最近要用到,放狗搜了一圈 » 2022-12-24 20:31:49
Download new driver file m25p80.c
diff the origin m25p80.c and my m25p80.c
64,66d63
< /* Used for Winbond flashes only. */
< #define OPCODE_WINBOND_ID 0x4b /* Get flash unique id */
<
1001,1016d997
< /* flash unique id probe */
< static int unique_id_prob(struct spi_device *spi, u8 *id)
< {
< int tmp;
< u8 code[5];
<
< code[0] = OPCODE_WINBOND_ID;
< tmp = spi_write_then_read(spi, &code, 5, id, 8);
< if (tmp < 0) {
< pr_debug("%s: error %d reading UNIQUE ID\n",
< dev_name(&spi->dev), tmp);
< return tmp;
< }
< return 0;
< }
<
1125,1136d1105
< /* show unique id in kernel debug log for w25q64 or w25q128. */
< if(info->jedec_id == 0xef4017 || info->jedec_id == 0xef4018) {
< u8 unique_id[8];
< if(!unique_id_prob(spi, unique_id)) {
< dev_warn(&spi->dev, "flash id: %02x%02x%02x%02x%02x%02x%02x%02x\n",
< unique_id[7], unique_id[6], unique_id[5], unique_id[4],
< unique_id[3], unique_id[2], unique_id[1], unique_id[0]);
< } else {
< dev_warn(&spi->dev, "failed to get flash unique id.\n");
< }
< }
< #188 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2022-12-23 19:35:37
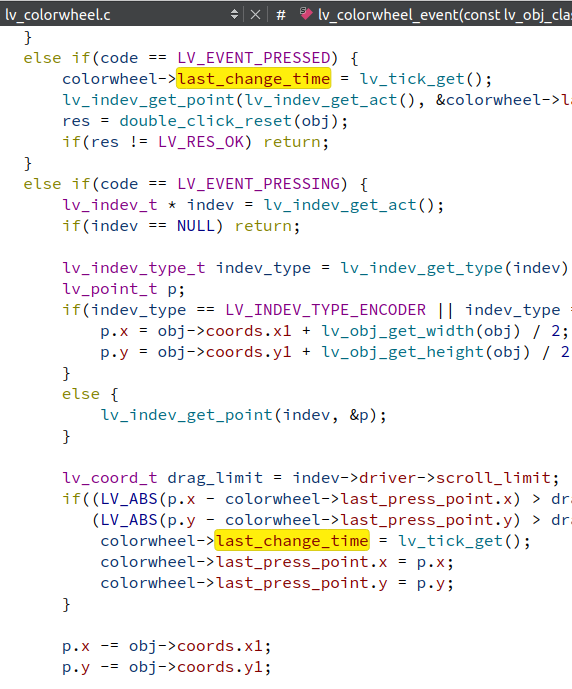
else if(code == LV_EVENT_PRESSED) {
colorwheel->last_change_time = lv_tick_get();
lv_indev_get_point(lv_indev_get_act(), &colorwheel->last_press_point);
res = double_click_reset(obj);
if(res != LV_RES_OK) return;
}
else if(code == LV_EVENT_PRESSING) {
lv_indev_t * indev = lv_indev_get_act();
if(indev == NULL) return;
lv_indev_type_t indev_type = lv_indev_get_type(indev);
lv_point_t p;
if(indev_type == LV_INDEV_TYPE_ENCODER || indev_type == LV_INDEV_TYPE_KEYPAD) {
p.x = obj->coords.x1 + lv_obj_get_width(obj) / 2;
p.y = obj->coords.y1 + lv_obj_get_height(obj) / 2;
}
else {
lv_indev_get_point(indev, &p);
}
lv_coord_t drag_limit = indev->driver->scroll_limit;
if((LV_ABS(p.x - colorwheel->last_press_point.x) > drag_limit) ||
(LV_ABS(p.y - colorwheel->last_press_point.y) > drag_limit)) {
colorwheel->last_change_time = lv_tick_get();
colorwheel->last_press_point.x = p.x;
colorwheel->last_press_point.y = p.y;
}
p.x -= obj->coords.x1;
p.y -= obj->coords.y1;
/*Ignore pressing in the inner area*/
uint16_t w = lv_obj_get_width(obj);
int16_t angle = 0;
lv_coord_t cir_w = lv_obj_get_style_arc_width(obj, LV_PART_MAIN);LVGL双击实现 double click
#190 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » 请问我可以设置Ubuntu的Framebuffer size吗?软件在嵌入式系统fb(800*1280)跑, 我想在Ubuntu下用fb模拟 » 2022-12-19 21:02:27
#191 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2022-12-10 19:20:10
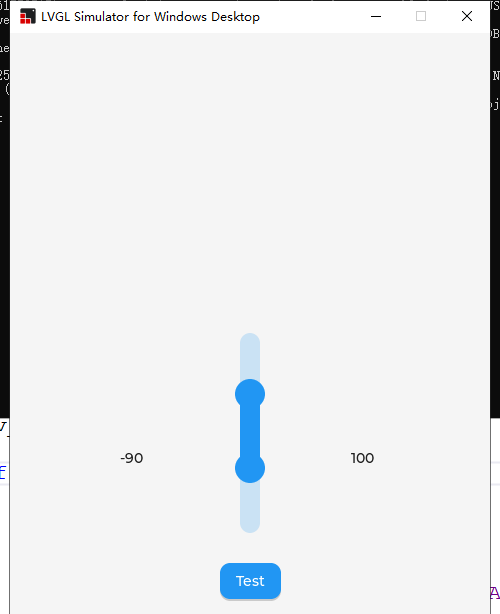
lv_obj_t* slider1;
lv_obj_t *label1, *label2;
void button_event_cb(lv_event_t* e)
{
lv_slider_set_value(slider1, 100, LV_ANIM_OFF);
}
void slider_event_cb(lv_event_t* e)
{
int32_t value = lv_slider_get_value(slider1);
char valueStr[32];
value = lv_slider_get_left_value(slider1);
snprintf(valueStr, sizeof(valueStr), "%d", value);
lv_label_set_text(label1, (valueStr));
value = lv_slider_get_value(slider1);
snprintf(valueStr, sizeof(valueStr), "%d", value);
lv_label_set_text(label2, (valueStr));
}
void lv_demo_test2()
{
slider1 = lv_slider_create(lv_scr_act());
lv_obj_center(slider1);
lv_slider_set_range(slider1, -255, 255);
lv_slider_set_mode(slider1, LV_SLIDER_MODE_RANGE);
lv_obj_add_event_cb(slider1, slider_event_cb, LV_EVENT_VALUE_CHANGED, NULL);
label1 = lv_label_create(lv_scr_act());
label2 = lv_label_create(lv_scr_act());
lv_obj_align_to(label1, slider1, LV_ALIGN_OUT_BOTTOM_LEFT, 0, 10);
lv_obj_align_to(label2, slider1, LV_ALIGN_OUT_BOTTOM_RIGHT, 0, 10);
lv_slider_set_left_value(slider1, -100, LV_ANIM_OFF);
lv_slider_set_value(slider1, 100, LV_ANIM_OFF);
lv_obj_set_size(slider1, 20, 200);
lv_obj_t* button1 = lv_btn_create(lv_scr_act());
lv_obj_t* label3 = lv_label_create(button1);
lv_label_set_text(label3, "Test");
lv_obj_add_event_cb(button1, button_event_cb, LV_EVENT_CLICKED, NULL);
lv_obj_align_to(button1, slider1, LV_ALIGN_OUT_BOTTOM_MID, 0, 30);
}
#192 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2022-12-10 19:02:18
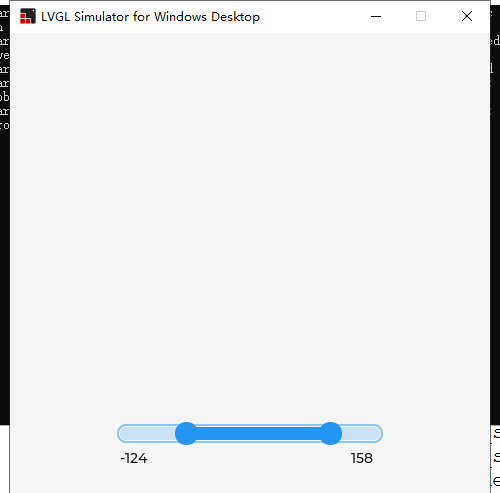
lv_obj_t* slider1;
lv_obj_t *label1, *label2;
void slider_event_cb(lv_event_t* e)
{
int32_t value = lv_slider_get_value(slider1);
char valueStr[32];
value = lv_slider_get_left_value(slider1);
snprintf(valueStr, sizeof(valueStr), "%d", value);
lv_label_set_text(label1, (valueStr));
value = lv_slider_get_value(slider1);
snprintf(valueStr, sizeof(valueStr), "%d", value);
lv_label_set_text(label2, (valueStr));
}
void lv_demo_test2()
{
slider1 = lv_slider_create(lv_scr_act());
lv_obj_center(slider1);
lv_slider_set_range(slider1, -255, 255);
lv_slider_set_mode(slider1, LV_SLIDER_MODE_RANGE);
lv_obj_add_event_cb(slider1, slider_event_cb, LV_EVENT_VALUE_CHANGED, NULL);
label1 = lv_label_create(lv_scr_act());
label2 = lv_label_create(lv_scr_act());
lv_obj_align_to(label1, slider1, LV_ALIGN_OUT_BOTTOM_LEFT, 0, 10);
lv_obj_align_to(label2, slider1, LV_ALIGN_OUT_BOTTOM_RIGHT, 0, 10);
}

#196 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » LVGL 学习记录 » 2022-12-06 16:36:47
- ubuntu
- 回复: 10
static lv_indev_drv_t pointer_driver;
lv_indev_drv_init(&pointer_driver);
pointer_driver.type = LV_INDEV_TYPE_POINTER;
pointer_driver.read_cb = lv_win32_pointer_driver_read_callback;
pointer_driver.feedback_cb = btn_feedback_event_cb;
lv_win32_pointer_device_object = lv_indev_drv_register(&pointer_driver);void btn_feedback_event_cb(lv_indev_drv_t* indev_drv, lv_event_code_t event)
{
printf("btn_feedback_event_cb\n");
switch (event)
{
case LV_EVENT_PRESSED:
printf("Pressed\n");
break;
case LV_EVENT_SHORT_CLICKED:
printf("Short clicked\n");
break;
case LV_EVENT_CLICKED:
printf("Clicked\n");
break;
case LV_EVENT_LONG_PRESSED:
printf("Long press\n");
break;
case LV_EVENT_LONG_PRESSED_REPEAT:
printf("Long press repeat\n");
break;
case LV_EVENT_RELEASED:
printf("Released\n");
break;
default:
printf("nothing\n");
break;
}
}#198 Re: 全志 SOC » 试一试把 V3s 当做 无线 wifi 热点 » 2022-09-29 18:14:51
#199 Re: 上海航芯 » Linux开发环境下试玩ACM32F403RET7开发板 » 2022-07-02 22:04:25
#200 Re: 全志 SOC » 【小智出品】安卓4寸86面板开发板SW106开卖啦,2.54排针引出IO。 » 2022-06-14 08:55:13
bigbigcong wrote:
1个G的片上内存!也是人才啊,,,话说这个芯片在网上怎么找不到相关的资料?是最新出的吗?
SW106 手册: SW106_Datasheet V1.0.pdf
- 首页
- » 搜索
- » ubuntu 发表的帖子
东莞哇酷科技有限公司开发