#1 Re: 全志 SOC » XSTAR准备开源了 » 2026-07-13 11:14:40
#3 Re: 站务公告/网站建设 » ★★★ 网站改版记录 ★★★ » 2026-05-26 12:14:08
#10 Re: 全志 SOC » 又发现一个新玩具 10.1英寸价签 SF-ESL E3T10W » 2025-11-03 10:10:54
#13 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 发现一个比F1C100还NB的芯片,带网络MAC,价格也NB. » 2025-09-18 10:00:19
#18 Re: 全志 SOC » 全志T3PRO 的EMAC使用的EMDIO时序问题 » 2025-06-11 11:21:38
#20 Re: 哇酷地摊(跳蚤市场) » 最近咸鱼上有个什么蚂蚁集团的板子,有知道是什么的么? » 2025-04-04 17:16:23
#21 Re: 全志 SOC » f1c200,读sf卡时,错位两个字节 » 2025-02-18 17:34:37
#28 Re: 全志 SOC » T113中断读取io状态赋值设置另外一个io 输出电平不同步 » 2024-08-06 21:43:47
#30 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » ssh 登录服务器,明明密钥是正确的,确提示 invalid format,终于找到问题了 » 2024-05-30 12:31:33
#31 Re: 工业芯 匠芯创 » d133打开网口后,编译报错。 » 2024-05-16 17:44:31
#32 Re: 工业芯 匠芯创 » d122bbv LVGL demo测试 » 2024-05-09 15:57:35

#34 Re: 全志 SOC » Linux时间戳到2038年后怎办? » 2024-05-06 13:12:15
#35 Re: 全志 SOC » linux的2038问题有哪位大佬处理过吗,帮忙指点下? » 2024-05-06 13:11:20
#36 Re: ST/STM8/STM8S/STM8L » 请问一下我用STM8做了一块门禁主板,打算接两片MFRC522(读卡板),通过SPI通讯,请问这三块板子需要共地吗? » 2024-04-23 20:42:23
#38 Re: 工业芯 匠芯创 » D211适配MIPI屏反复上电断电有概率只亮背光 » 2024-04-13 15:40:04
#40 Re: 工业芯 匠芯创 » D21x 的UART的最高速度到底是多少? » 2024-04-01 10:02:28
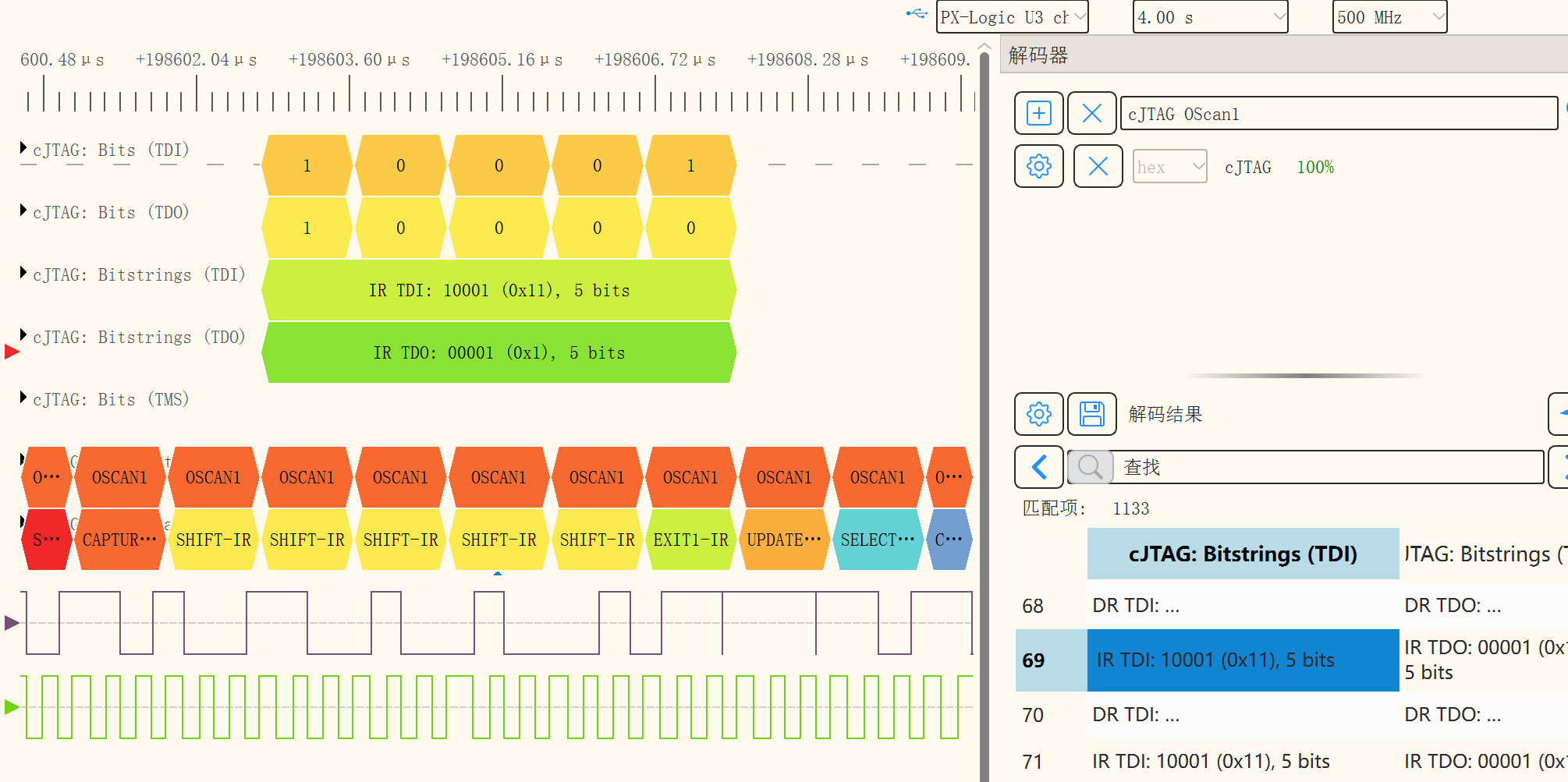
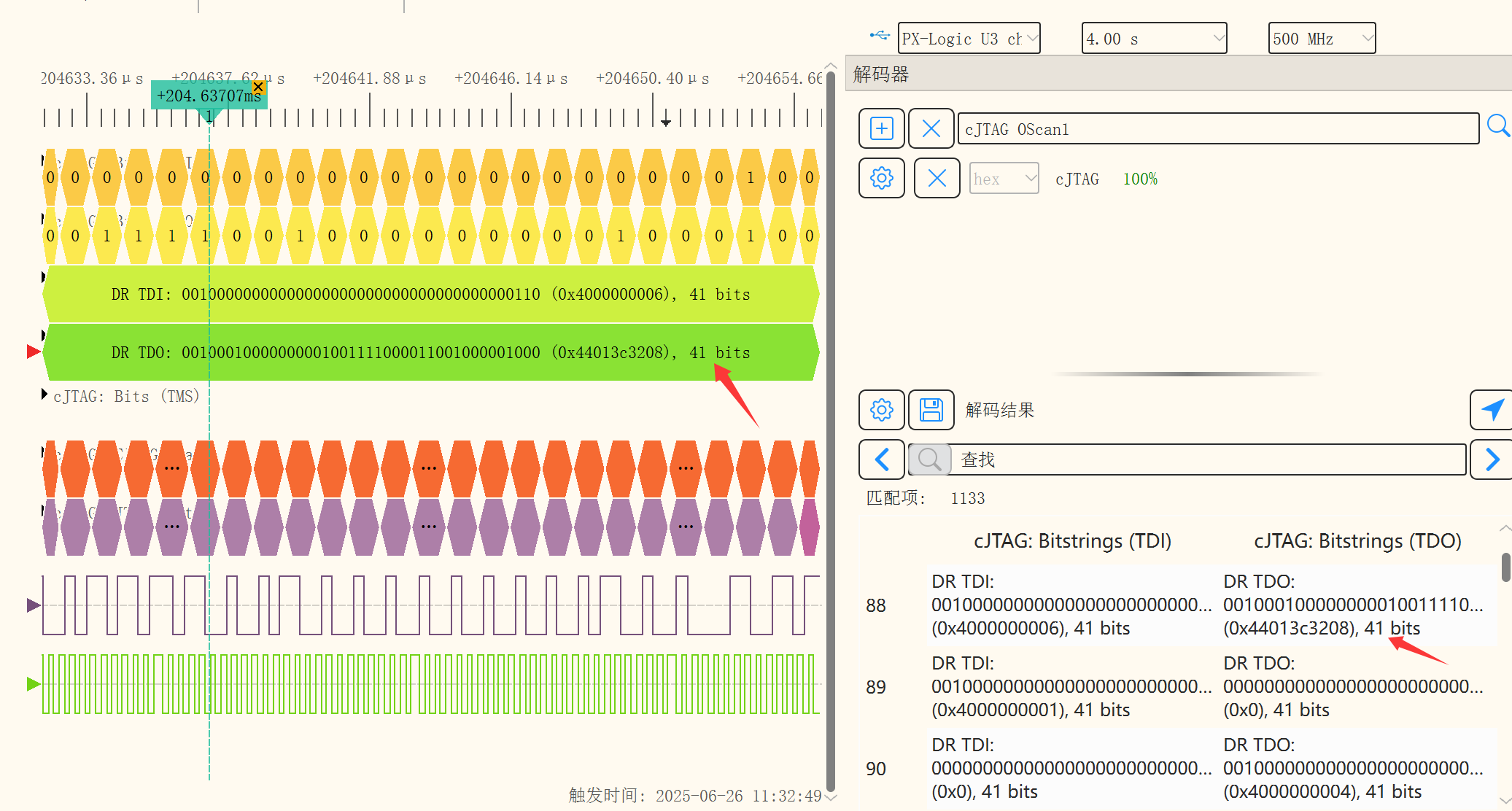
#43 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-11-06 21:02:21
#45 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 分享咸鱼上便宜的两款微型投影驱动玩玩,一款驱动简单,一款分辨率高,都是LCOS屏的。欢迎探讨交流 » 2023-10-17 10:05:10
#47 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-10-10 11:36:54
晶振就频率,电压,封装引脚, 这3条对得上就行。
ppm看不同应用,但有源晶振基本没太差的。
我同事贴的应该是这个 https://item.szlcsc.com/30858.html
#48 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-10-06 10:57:56
#49 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-30 11:46:01
#50 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-21 10:01:28
#51 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-21 09:36:37
#52 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-20 20:27:23
#53 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-18 23:14:58
#54 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-18 22:24:42
#55 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-18 21:44:53
aozima wrote:
@usbbios 这个硬件有人发车吗? 想搭个车。
或新开1趟车?
做回来了,体验挺好的,软件直接把68013的烧录和fpga的烧录全做了,不用额外安装软件和下载器。
同样还是这个软件,直接扔Wireshark里面就能抓包。
显示的内容也比较全,好在可以使用Wireshark的过滤器过滤掉不需要显示的内容。
!(usbll.pid == 0x69) IN
!(usbll.pid == 0x5a) NAK
!(usbll.pid == 0xa5) SOF
!(syslog.msg == "USB PHY error") && !(usbll.invalid_pid) && !(usbll.pid == 0x5a) && !(usbll.pid == 0xa5) && !(usbll.pid == 0x69)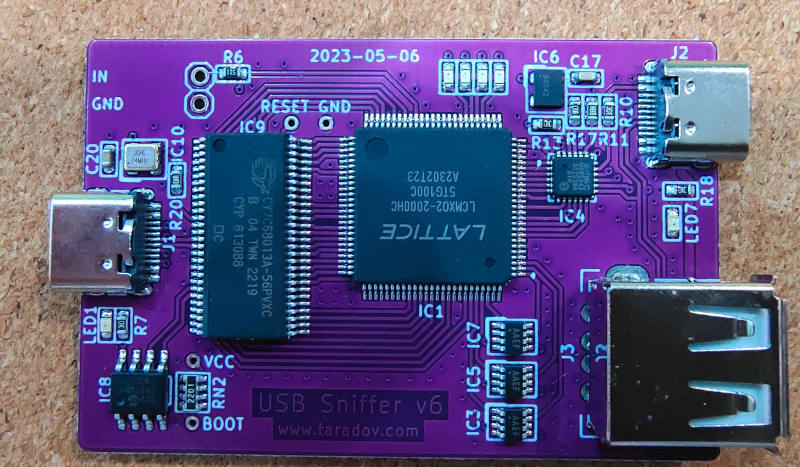
#56 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-09-04 10:11:45
#57 Re: 全志 SOC » F1C100内置语音识别算法的测试 » 2023-08-11 12:10:31
#60 Re: 全志 SOC » F1C100S原理图PCB可直接打样 » 2023-07-10 17:58:25
#61 Re: 全志 SOC » Line in接口插了话筒却录的都是杂音!被大佬笑死了!原来Line in和Mic in是有区别的!还有不知道的小伙伴赶紧补补! » 2023-04-21 10:18:14
#63 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-03-22 23:16:39
#64 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-03-22 13:01:20
#65 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 【新玩具get】AGM AGRV2K,16.8块钱的MCU+FPGA二合一芯片 » 2023-03-16 11:54:23
#66 Re: RISC-V » 为什么mcu厂家还是用gcc而不是llvm » 2023-03-10 13:05:17
#67 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-03-10 09:48:37
#68 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 怒开新坑,自制低成本高速USB分析仪(随缘更新) » 2023-02-28 09:52:41
#71 Re: 感芯科技 » 给MC3172 增加shell » 2023-02-16 15:16:33
#72 Re: 全志 SOC » freertos 运行是否需要使能mmu? » 2023-02-12 09:48:23
#73 Re: 全志 SOC » freertos 运行是否需要使能mmu? » 2023-02-11 23:15:21
ARM的MMU和CACHE在一起,为了开CACHE,MMU也必须开。
但可以像RT-Thread那样,虽然开了,但做1:1映射就行。
注意cache只对ddr部分开启,外设部分不开。
RISC-V的大部分芯片,MMU和CACHE分开的,可以不开MMU只开CACHE
当然CACHE也可以不开,但用DDR的话会卡成狗。
可以直接用坛友移植好的: https://whycan.com/t_3958.html
RT-Thread主仓库的bsp也可以用: https://gitee.com/rtthread/rt-thread/tree/v4.0.x/bsp/allwinner_tina
#74 Re: 全志 SOC » F1C100S USB口改为TYPE-C口引发的问题? » 2023-02-11 23:09:18
#75 Re: 全志 SOC » 平头哥云上实验室,可以申请远程测试大量芯片或开发板 » 2023-01-06 00:00:39
#76 Re: RISC-V » RISC-V不支持非对齐地址访问非常坑 » 2023-01-05 23:58:49
#77 Re: 全志 SOC » 平头哥云上实验室,可以申请远程测试大量芯片或开发板 » 2023-01-05 18:19:10
#78 Re: 全志 SOC » f1c100s能接25MHz晶振么? » 2022-12-05 17:53:16
PLL出来也是整百的,24还是25好像关系不大。楼主是哪个外设要多少频率?
#80 Re: RISC-V » RISC-V核心的SoC有没有已经在产品上广泛使用的型号? » 2022-11-08 18:40:10
#81 Re: RISC-V » GCC 12把CSR相关指令放到扩展Zicsr中了 » 2022-11-08 10:01:42
#82 Re: 全志 SOC » MIPI屏上电时序问题请教 » 2022-10-27 19:51:30
#83 Re: RISC-V » 诛仙剑 C-SKY Linux 开发板 入坑记录 » 2022-10-15 11:59:01
#84 Re: RISC-V » WCH又搞了个性价比王炸CH32V003 » 2022-10-13 10:40:39
#85 Re: 感芯科技 » 请教,关于SPI输出引脚的“毛刺”信号 » 2022-10-10 23:59:45
#86 Re: 全志 SOC » F1C100S玩游戏系列-FC红白机Nes模拟器(二)-移植正点原子的nes模拟器(ye781205的汇编核心),带声音,ARM转GNU汇编 » 2022-10-09 16:49:26
#89 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 沁恒ch565w测试 USB3.0速度和千兆以太网速度 » 2022-09-27 09:59:18
#91 Re: 全志 SOC » f1c100s RGB接口 » 2022-09-07 16:10:06
你看下这个
求一份全志f1c100s的8080接口的lcd驱动 https://whycan.com/t_6744.html
#92 Re: 全志 SOC » f1c100s串口最大波特率多少 » 2022-09-05 11:43:50
f1c100s/200s的串口波特率最大是多少? https://whycan.com/t_4673.html
#98 Re: 全志 SOC » 请问t113-s3 支持h264编码吗 » 2022-08-09 11:59:09
#100 Re: 感芯科技 » MC3172用户测评汇总(持续更新) » 2022-07-27 22:39:18
#103 Re: 全志 SOC » 全志V853开发板--构建编译 » 2022-07-19 15:47:24
#104 Re: 全志 SOC » 请教,如何在Planck Pi上运行RT-Thread » 2022-07-16 12:26:56
#105 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 众人拾柴-魔改SPI为一主多从高速总线【迪卡总线】 » 2022-07-13 09:49:50
#106 Re: 上海航芯 » 大家一起来研究ACM32F4芯片 » 2022-07-09 13:04:26
#107 Re: 全志 SOC » f1c100s/200s的串口波特率最大是多少? » 2022-06-30 10:54:11
#108 Re: 全志 SOC » f1c100s/200s的串口波特率最大是多少? » 2022-06-30 10:42:06
#110 Re: 全志 SOC » f1c100s/200s的串口波特率最大是多少? » 2022-06-25 19:32:59
#111 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » surface RT 平板上 LINUX » 2022-06-20 12:11:22
#114 Re: 全志 SOC » 基于全志V3S和Qt的简易平板 » 2022-06-12 22:55:50
#115 Re: 站务公告/网站建设 » 现在发帖后的审核时间一般是多久?回帖是否是需要相同的审核时间? » 2022-06-10 16:59:05
#116 Re: 全志 SOC » 成功在T113-S3上跑了第一个裸机程序 » 2022-06-10 09:59:58
#117 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 咸鱼找到一个BK7252方案的Wi-Fi摄像头,跑的还是RT-Thread » 2022-06-09 11:14:39
#118 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 咸鱼找到一个BK7252方案的Wi-Fi摄像头,跑的还是RT-Thread » 2022-06-08 17:28:59
#119 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 咸鱼找到一个BK7252方案的Wi-Fi摄像头,跑的还是RT-Thread » 2022-06-08 10:30:53
#120 Re: 全志 SOC » 利用xfel及mkz工具实现一机一镜像量产方案 » 2022-06-07 23:43:36
#121 Re: 全志 SOC » T113同时启用RISC-V和A7双核的尝试 » 2022-06-06 21:17:54
#122 Re: 全志 SOC » F1C100S裸机 Timer USB HOST » 2022-06-03 15:51:57
时空vsxx wrote:
楼主的USB HOST 实现了吗。我最近也在调试USB HOST MSC
#124 Re: 全志 SOC » F1C100s ADC使用一坑 » 2022-05-27 14:06:16
#125 Re: RISC-V » 自制小型操作系统内核nxos支持risc-v架构64位系统 » 2022-05-26 16:19:36
#126 Re: 好钜润半导体(TIKY) » TKM32F499能否支持7寸屏?有无购买链接? » 2022-05-24 18:21:11
#129 Re: 全志 SOC » F1C200S能不能不跑系统,直接寄存器操作,跑底层。 » 2022-05-22 11:04:28
#131 Re: 全志 SOC » Kicad 的 sch 文件是 lisp吗? » 2022-05-16 16:54:11
#132 Re: BLDC电机驱动 » 画了个一体脱机机械臂驱动器 » 2022-05-11 23:48:02
#134 Re: 全志 SOC » xfel烧录到t113的0x20000sram失败是怎么回事 » 2022-05-09 18:31:00
#135 Re: 全志 SOC » rt-thread 中串口的读取 » 2022-04-30 19:54:06
#138 Re: 全志 SOC » 最近准备入坑,偏向裸机,选择哪款Soc好点? » 2022-04-21 16:27:55
#139 Re: 全志 SOC » T113-S3 RT-Thread SMP适配笔记 » 2022-04-16 13:06:42
#140 Re: 全志 SOC » T113-S3 RT-Thread SMP适配笔记 » 2022-04-16 13:06:33
#142 Re: 全志 SOC » go语言裸机编程探索 » 2022-04-11 22:38:43
#143 Re: 司徒开源 » 研究FC3000掌機的開源可行性 » 2022-04-10 18:55:46
#144 全志 SOC » T113-S3 RT-Thread SMP适配笔记 » 2022-04-10 13:25:58
- aozima
- 回复: 13
T113-S3 SMP适配笔记
目标
给T113-S3适配RT-Thread,并支持SMP。
资料
没有太详细的资料和示例,只有一些零星的信息。
F133封装基本兼容
Cortex-A7双核
一些参考资料
计划
最好能直接使用xfel在SRAM,或是DDR中运行,避免从SD卡启动还需要SPL。
先用xfel payload跑通, 最好能有串口打印。
再尝试直接load到ddr运行。
尝试在DDR中运行rt-thread
尝试响应中断
尝试支持SPL
过程
环境准备
开发板 芒果派
下载工具 xfel
先连接好开发板,默认没卡也没有FLASH,会自动进入USB FEL。
通过xfel可以探测并读取芯片信息。
$ xfel version
AWUSBFEX ID=0x00185900(R528/T113) dflag=0x44 dlength=0x08 scratchpad=0x00045000
$ xfel sid
d3402000ec1408140140082114cb5bcb
$ xfel ddr t113-s3
Initial ddr controller succeededxfel payload
磨刀不误砍柴工,调芯片最好有JTAG,没有的情况下,串口打印是必须的。
xfel工程里面有默认有t113-s3的ddr和spi的payload工程了。
我们先从里面剥离出最简单的串口操作代码,让其至少有输出功能,方便后面打印日志。
使用新编译出的payload,重新编译生成xfel,再随便执行下spi flash命令,串口有打印就行了。
留着这代码备用。
ddr中运行代码
继续基于上面的代码,把具体的功能可以先屏蔽。然后把修改链接地址为ddr。
然后使用xfel把这代码加载到DDR中,运行下看没有输出。
xfel ddr t113-s3
xfel write 0x40000000 spi.bin
xfel exec 0x40000000果然看到了打印,说明可以使用xfel直接加载程序到DDR中运行,这样为后面的开发带来了极大的便利。
DDR中运行rt-thread
有了基本开发条件后,就可以开始移植软件部分了。
因为是cortex-a的内核,这块都比较通用,我打算基于bsp/qemu-vexpress-a9来修改。
先是使用menuconfig重新配置一下,把所有用不到的组件全关了,只留最基本的kernal和串口驱动部分。
再把链接脚本中的地址修改为目标芯片的地址 0x40000000。
然后把board.c中的中断和时钟心跳这些与硬件有关的代码先屏蔽。
串口驱动
因为没有JTAG,那么串口驱动是必须的了, 把之前从xfel payload中提取出来的串口驱动复制过来。
替换到原来的串口驱动的初始化部分,并把原来的所有硬件相关的代码暂时屏蔽。
只保留putc功能。
编译通过后,使用xfel加载到ddr中运行。观察串口。
果然没有任何打印 !!!!
汇编中的debug
遇事不要慌,问题肯定不大。没有任何打印说明程序没能正常运行,或是打印本身有问题。
首先没被运行的可能性可以排除,因为之前加载payload改的小代码可以运行的。
然后就是有可能程序还没运行到程序中串口初始化的地方,此时最好能有JTAG单步,或是能知道启动代码中的汇编程序都运行到哪了。
如果是C,每行加个打印就好了。嗯,汇编也能加。
因为驱动中的接口都是一堆参数,带句柄,还是static的,显然不方便汇编里面调用。
于是我们单独改造下,让串口初始化不需要参数,输出函数只要一个输出数据参数即可。
void sys_uart_init(void)
{
virtual_addr_t addr;
uint32_t val;
/* Config GPIOE2 and GPIOE3 to txd0 and rxd0 */
addr = 0x020000c0 + 0x0;
val = readl(addr);
val &= ~(0xf << ((2 & 0x7) << 2));
val |= ((0x6 & 0xf) << ((2 & 0x7) << 2));
write32(addr, val);
............
}
void sys_uart_putc(char c)
{
virtual_addr_t addr = 0x02500000;
while((readl(addr + 0x7c) & (0x1 << 1)) == 0);
write32(addr + 0x00, c);
}这样汇编中就可以比较方便调用了,先放在启动入口看看有没打印。
.globl _reset
_reset:
ldr r1, [r1]
bl sys_uart_init
mov r0, ='R'
bl sys_uart_putc
mov r0, ='T'
bl sys_uart_putc
mov r0, ='T'
bl sys_uart_putc新程序加载到DDR中,果然看到了我们想要的RTT这3个字的打印。说明程序运行到了这里。
通过这种办法,继续在汇编中不同位置添加不同的字符,最后定位到是进MMU初始化就再没打印了。
哦!!! 想起来还没更新MMU配置呢。
MMU配置可以先简单些,32位的全4G空间全部当成外设,把DDR区域设置为常规(带cache,可运行)
修改board.c中的platform_mem_desc表就好了
struct mem_desc platform_mem_desc[] = {
{0x00000000, 0xFFFFFFFF, 0x00000000, DEVICE_MEM},
{0x40000000, 0x47FFFFFF, 0x40000000, NORMAL_MEM},
};更新mmu配置后,果然看到了 RT-Thread 启动LOGO,还打印了msh>。
当然,此时命令行不能输入。因为我们串口驱动的输入还没写。
因为全志的串口驱动基本兼容的,知道串口外设的基地址,直接抄原来其它芯片的代码,直接读寄存器,把getc实现就好了。
但还是不能输入,应该是要支持中断才行。
中断
cortex-A芯片一般都使用GIC,但有好几个版本,通过有限的资料查到,T113-S3是使用GICv2。
这块代码都是通用的,关键是要知道其在芯片中的地址,这个PDF中也有查到GIC地址是在0x03020000。
RT-Thread中,GICv2的基本适配已做好,新芯片适配需要知道2个地址,但PDF中没写。
这块根据全志同类型芯片的偏移来看,猜测是一样的
/* the basic constants and interfaces needed by gic */
rt_inline rt_uint32_t platform_get_gic_dist_base(void)
{
return 0x03021000;
}
rt_inline rt_uint32_t platform_get_gic_cpu_base(void)
{
return 0x03022000;
}再通过PDF上面查到的UART0中断号是34,改好后,加载运行,果然收到中断了。
SMP
接下来就是适配SMP了,因为只是2核,所以也不用管分簇这些了。
最主要是要知道第2个核是怎么启动,启动后会运行哪个地址的程序。
其它这里还有个坑点要注意,就是有些芯片多核是自动启动的,但此时一般软件环境还没准备好,可能会乱飞,需要把非0核先暂停下来。
如果是这类芯片,就需要把RT_SMP_AUTO_BOOT打开,这样非0核会自动挂起,直到被0核唤醒,再去指定地址运行。
因为我们之前都能正常运行了,所以肯定不是这种类型的。
通过 https://whycan.com/t_7808.html 这个贴子里面 shaoxi2010 大佬的说明,知道了第2个核的启动方法。
此时更新menuconfig把SMP打开,然后更新下SMP需要的几个接口
/*
The Soft Entry Address Register of CPU0 is 0x070005C4.
The Soft Entry Address Register of CPU1 is 0x070005C8.
*/
void rt_hw_secondary_cpu_up(void)
{
uint32_t cpuboot_membase = 0x070005c4;
uint32_t cpuxcfg_membase = 0x09010000;
uint32_t cpu, reg;
cpu = 1;
/* Set CPU boot address */
writel((uint32_t)(secondary_cpu_start), cpuboot_membase + 4 * cpu);
/* Deassert the CPU core in reset */
reg = readl(cpuxcfg_membase);
writel(reg | (1 << cpu), cpuxcfg_membase);
__asm__ volatile ("isb":::"memory");
}一些和芯片外设相关的先禁用掉,不要心跳也是能运行的。
void secondary_cpu_c_start(void)
{
// int timer_irq_number;
// timer_irq_number = aw_get_irq_num("TIMER1");
rt_hw_vector_init();
rt_hw_spin_lock(&_cpus_lock);
arm_gic_cpu_init(0, platform_get_gic_cpu_base());
// arm_gic_set_cpu(0, timer_irq_number, 0x2); //timer1
// timer1_init();
// rt_hw_interrupt_install(timer_irq_number, rt_hw_timer1_isr, RT_NULL, "tick1");
// rt_hw_interrupt_umask(timer_irq_number);
rt_system_scheduler_start();
}编译通过后,使用xfel加载到ddr中运行。SMP果然愉快地运行起来了。
\ | /
- RT - Thread Operating System
/ | \ 4.1.0 build Apr 9 2022 21:17:55
2006 - 2022 Copyright by RT-Thread team
[I/sal.skt] Socket Abstraction Layer initialize success.
cpuxcfg_membase = 0x13FF0101 // 启动之前的值
cpuxcfg_membase = 0x13FF0103 // 启动之后的值
Hello T113 RT-Thread SMP!
msh />ps
thread cpu bind pri status sp stack size max used left tick error
-------- --- ---- --- ------- ---------- ---------- ------ ---------- ---
tshell 0 2 20 running 0x00000140 0x00001000 15% 0x0000000a 000
aio N/A 2 16 suspend 0x00000080 0x00000800 07% 0x0000000a 000
sys work N/A 2 23 suspend 0x00000084 0x00000800 06% 0x0000000a 000
tsystem N/A 2 30 suspend 0x00000098 0x00000400 22% 0x00000020 000
tidle1 1 1 31 running 0x0000005c 0x00000400 19% 0x00000020 000
tidle0 N/A 0 31 ready 0x0000005c 0x00000400 19% 0x00000020 000
timer N/A 2 4 suspend 0x0000007c 0x00000400 12% 0x0000000a 000后续
整理代码上gitee
#145 Re: 全志 SOC » 小麻雀 Nezha-MQ 迎来双核A7版本128M内存(基于T113-s3) » 2022-04-09 21:36:12
@shaoxi2010 谢谢大佬!SMP启动成功
/*
The Soft Entry Address Register of CPU0 is 0x070005C4.
The Soft Entry Address Register of CPU1 is 0x070005C8.
*/
void rt_hw_secondary_cpu_up(void)
{
uint32_t cpuboot_membase = 0x070005c4;
uint32_t cpuxcfg_membase = 0x09010000;
uint32_t reg;
/* Set CPU boot address */
writel((uint32_t)(secondary_cpu_start), cpuboot_membase + 1 * 4);
/* Deassert the CPU core in reset */
reg = readl(cpuxcfg_membase);
writel(reg | (1 << 1), cpuxcfg_membase);
reg = readl(cpuxcfg_membase);
__asm__ volatile ("isb":::"memory");
} \ | /
- RT - Thread Operating System
/ | \ 4.1.0 build Apr 9 2022 21:17:55
2006 - 2022 Copyright by RT-Thread team
[I/sal.skt] Socket Abstraction Layer initialize success.
cpuxcfg_membase = 0x13FF0101 // 启动之前的值
cpuxcfg_membase = 0x13FF0103 // 启动之后的值
Hello T113 RT-Thread SMP!
msh />ps
thread cpu bind pri status sp stack size max used left tick error
-------- --- ---- --- ------- ---------- ---------- ------ ---------- ---
tshell 0 2 20 running 0x00000140 0x00001000 15% 0x0000000a 000
aio N/A 2 16 suspend 0x00000080 0x00000800 07% 0x0000000a 000
sys work N/A 2 23 suspend 0x00000084 0x00000800 06% 0x0000000a 000
tsystem N/A 2 30 suspend 0x00000098 0x00000400 22% 0x00000020 000
tidle1 1 1 31 running 0x0000005c 0x00000400 19% 0x00000020 000
tidle0 N/A 0 31 ready 0x0000005c 0x00000400 19% 0x00000020 000
timer N/A 2 4 suspend 0x0000007c 0x00000400 12% 0x0000000a 000
#148 Re: 全志 SOC » v3s 掌机 参考FUNKEY » 2022-04-07 20:31:28
#149 Re: Xilinx/Altera/FPGA/CPLD/Verilog » 最近研究了下Xilinx 的XVC,发现jlink有了个新玩法,可以白嫖一个xilinx高速下载器了 » 2022-04-07 09:45:36
#150 Re: 全志 SOC » F1C200S牺牲颜色数量,增加一个TWI1出来? » 2022-04-02 15:20:47
#151 Re: 技术人生/软件使用技巧/破解经验/技术吐槽/灌水 » 示波器浏览贵站效果还可以 » 2022-04-02 11:22:02
#152 Re: 全志 SOC » Linux时间戳到2038年后怎办? » 2022-04-01 16:07:06
#154 Re: 全志 SOC » Linux时间戳到2038年后怎办? » 2022-04-01 10:57:00
#155 Re: 全志 SOC » 关于ssh连接的提问 » 2022-03-21 20:55:01
#156 Re: 全志 SOC » go语言裸机编程探索 » 2022-03-21 11:39:42
#157 Re: 全志 SOC » 这个M.2 67p和75p啥关系啊,tb都是67p的 » 2022-03-19 09:40:36
指ngff接口? 这篇博文写得很详细 https://blog.csdn.net/greless/article/details/51698662
#158 Re: 全志 SOC » 请大家推荐一个AT命令收发的纯C开源代码包 » 2022-03-19 09:36:21
#159 Re: 全志 SOC » F1C200S牺牲颜色数量,增加一个TWI1出来? » 2022-03-18 21:11:26
#160 Re: 全志 SOC » F133跑rtt不定时宕机,好烦躁啊 » 2022-03-18 16:14:34
#161 Re: RISC-V » WCH的RISC-V居然跑出了3.84DMIPS/MHz的成绩... » 2022-03-12 10:24:39
#162 Re: RISC-V » WCH的RISC-V居然跑出了3.84DMIPS/MHz的成绩... » 2022-03-12 00:29:09
#163 Re: 全志 SOC » 捡到一个东西,帮忙鉴定一下 » 2022-03-09 20:42:38
#164 Re: 全志 SOC » F1C100s跑rtt+lvgl显示gif图片效果卡顿求助 » 2022-03-09 18:20:14
#166 Re: 全志 SOC » 分享一个用于烧录SD-NAND或EMMC的xfel版本,目前支持F133/D1S » 2022-02-23 10:41:22
@sniper
在楼主位我的PR链接那里可以看到我的完整代码的,在这个分支 https://github.com/aozima/xfel/tree/aozima_sd
欢迎继续改造。另外你也是直接在板上焊接SD-NAND吗?
也可以试试这位大佬的方法,我暂时文件不大,还没空测试。
https://bbs.aw-ol.com/topic/1002/
#168 Re: 全志 SOC » 使用rust对arm9处理器进行裸机开发 » 2022-02-11 15:59:42
#169 Re: 全志 SOC » 修改D1s的串口控制台,成功了但没完全成功,请教原因 » 2022-02-10 15:22:06
#171 Re: 全志 SOC » f133跑rtt测试了下memcpy速度那么慢的吗 » 2022-01-24 09:57:44
可以对比下这个贴子 https://whycan.com/t_7592.html
#172 Re: 全志 SOC » F1C100s如何实现批量加密烧录 » 2022-01-21 10:15:53
因芯片本身没加密,所以至少SPL那阶段是不加密的。
你可以程序起来后,根据ID自己算一份,然后自己把自己给更新了。
#173 Re: VMWare/Linux/Ubuntu/Fedora/CentOS/U-BOOT » VirtualBox在win10下性能比较差的解决办法 » 2022-01-20 11:47:36
VMware也可以调优下: VMware虚拟机共享windows目录性能调优小技巧
#175 全志 SOC » 分享一个用于烧录SD-NAND或EMMC的xfel版本,目前支持F133/D1S » 2022-01-19 13:12:41
- aozima
- 回复: 41
在使用F133,板子是用的128MB的SD-NAND。然后就遇到烧录问题,因为之前开发板都是拔卡下来烧录的,现在焊上面没法拔,看到xfel添加了spi nand的支持,所以想着在xfel中添加sd的支持也是可以的。
代码已发PR,但因速度不够快,估计不会合并进主干。所以单独发个编译好的exe方便有需要用到的小伙伴。
下载:
xfel-sd_v1.2.4-0c87477d-259075.zip
目前支持多块读写,速度有260KB左右,烧录柿饼固件10MB以下还是够用了。
启来后剩下的资源用SPI WIFI来下载,不过WIFI也就1MB左右,快不到多少。所以调试时要烧录128MB也是可以等等。。。
使用方法(格式基本和FLASH一样,不过内部把length对齐到了8KB):
xfel sd - Detect sd card
xfel sd read <address> <length> <file> - Read sd card to file
xfel sd write <address> <file> - Write file to sd card相关贴子
#176 DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » VMware虚拟机共享windows目录性能调优小技巧 » 2022-01-19 12:50:35
- aozima
- 回复: 2
有在windows上面使用VMware Player虚拟机,并使用使用vmhgfs挂载windows上面的目录,使用上倒是挺方便。
但是编译大些的项目,相比虚拟机里面的linux上面ext4文件系统就慢多了。
现在调整了一缓存相关的参数,快多了。以编译F133的工程为例,原来2分半,现在20秒。
具体参数细节可以再自己研究调整下。
当然,有了缓存意味着2边同步的时间会变长,不过我的应用主要是在win上面编写和调试。linux里面用docker主要做编译工作,所以两边不会对同一个文件进行读写,且两边切换是手动的,过程至少也要几秒,所以问题不大。
$ vmhgfs-fuse -h
$ vmhgfs-fuse .host:/ /mnt/hgfs -o subtype=vmhgfs-fuse,allow_other,entry_timeout=3,negative_timeout=3,attr_timeout=3,auto_cache测试好后建议直接写到/etc/fstab中
$ cat /etc/fstab
...
.host:/ /mnt/hgfs fuse.vmhgfs-fuse allow_other,entry_timeout=3,negative_timeout=3,attr_timeout=3,defaults 0 0vm+vmhgfs 默认参数
$ vmhgfs-fuse .host:/ /mnt/hgfs -o subtype=vmhgfs-fuse,allow_other
$ time scons -j12
real 2m27.556s
user 0m35.779s
sys 0m46.991svm+vmhgfs 调整参数
$ vmhgfs-fuse .host:/ /mnt/hgfs -o subtype=vmhgfs-fuse,allow_other,entry_timeout=3,negative_timeout=3,attr_timeout=3,auto_cache
$ time scons -j12
real 0m20.262s
user 0m50.965s
sys 0m21.402svm+ext4
$ time scons -j12
real 0m9.358s
user 1m4.950s
sys 0m19.415s#177 Re: 全志 SOC » XFEL已支持spi nand flash烧写 » 2022-01-12 20:39:55
#178 Re: 全志 SOC » XFEL已支持spi nand flash烧写 » 2022-01-12 12:10:29
#179 Re: 全志 SOC » XFEL已支持spi nand flash烧写 » 2022-01-10 23:28:46
#180 Re: DIY/综合/Arduino/写字机/3D打印机/智能小车/平衡车/四轴飞行/MQTT/物联网 » 请教CH579的网络,不用库自己初始化的问题 » 2022-01-09 17:42:11
#181 Re: ESP32/ESP8266 » 有没有用wifi soc做的pi? » 2021-12-29 11:41:26
#182 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » [求助]RTT组件自动统一初始化宏INIT_EXPORT » 2021-12-29 10:01:56
#183 Re: 计算机图形/GUI/RTOS/FileSystem/OpenGL/DirectX/SDL2 » [求助]RTT组件自动统一初始化宏INIT_EXPORT » 2021-12-29 10:00:44
#185 Re: 全志 SOC » F1C100s-LCD-TV-CH579M 板子 » 2021-12-22 19:09:45
#186 Re: 全志 SOC » 玩转RT-Thread之荔枝派Nano(全志F1C100S) 新手上路 » 2021-12-15 20:26:57
#187 Re: 全志 SOC » f1c100s性能和stm32哪个型号性能差不多啊 » 2021-12-15 18:30:46
#188 Re: Openwrt/LEDE/AR9331/MT7688/RT5350 » 深圳云联芯科技的开源新唐NUC980开发板子支持openwrt【免费赠送,先付款80元,发帖后退款】 (活动结束,现在可以淘宝购买) » 2021-12-13 15:56:19
#189 Re: Nuvoton N32905/N32926/NUC972/N9H20/N9H26/N9H30 » 请教关于NUC972开发项目需求,麻烦大佬给个评估和可行性 » 2021-11-30 09:43:17
#190 Re: 全志 SOC » 请问裸机f1c100s+lvgl可以屏幕旋转90°吗 » 2021-11-20 20:48:55
#191 Re: 全志 SOC » f1c100s/200s的串口波特率最大是多少? » 2021-11-19 20:14:28
#192 Re: 全志 SOC » XFEL已支持spi nand flash烧写 » 2021-11-03 11:45:27
#193 Re: 全志 SOC » XFEL已支持spi nand flash烧写 » 2021-11-02 10:10:02
#194 Re: 全志 SOC » 请问一下用全志f1c200s或者其他型号的跑ui可以做到秒开吗, » 2021-11-01 12:06:10
#195 Re: Cortex M0/M3/M4/M7 » GD32F1x0的非零等待闪存运行速度测试 » 2021-10-26 11:23:48
#196 Re: 全志 SOC » 【全开源/D1s】芒果派麻雀 MangoPi-MQ1 基于D1s 的 RISC-V Linux小板 【最新消息:淘宝开卖了,链接在一楼】 » 2021-10-25 20:22:00
#200 Re: 全志 SOC » 请问可以通过uboot命令进入fel烧录模式吗? » 2021-10-16 21:09:27
东莞哇酷科技有限公司开发